用于旋转原点周围点的正确三角法
以下哪种方法都使用正确的数学来旋转一个点?如果是这样,哪一个是正确的?
POINT rotate_point(float cx,float cy,float angle,POINT p)
{
float s = sin(angle);
float c = cos(angle);
// translate point back to origin:
p.x -= cx;
p.y -= cy;
// Which One Is Correct:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
// translate point back:
p.x = xnew + cx;
p.y = ynew + cy;
}
3 个答案:
答案 0 :(得分:27)

答案 1 :(得分:22)
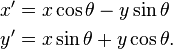
这取决于您如何定义angle。如果它是逆时针测量的(这是数学约定)那么正确的旋转是你的第一个:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
但如果按顺时针方向测量,那么第二个是正确的:
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
答案 2 :(得分:1)
这是从我自己的矢量库中提取的。
//----------------------------------------------------------------------------------
// Returns clockwise-rotated vector, using given angle and centered at vector
//----------------------------------------------------------------------------------
CVector2D CVector2D::RotateVector(float fThetaRadian, const CVector2D& vector) const
{
// Basically still similar operation with rotation on origin
// except we treat given rotation center (vector) as our origin now
float fNewX = this->X - vector.X;
float fNewY = this->Y - vector.Y;
CVector2D vectorRes( cosf(fThetaRadian)* fNewX - sinf(fThetaRadian)* fNewY,
sinf(fThetaRadian)* fNewX + cosf(fThetaRadian)* fNewY);
vectorRes += vector;
return vectorRes;
}
相关问题
最新问题
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?