从glLookAt()到glRotatef()和gltranslatef
我需要用gluLookAt()和glRotatef()操作替换glTranslatef()操作。
我想用gluLookAt(1,1,0,0,0,0,0,1,0);做到这一点,但我猜到了一些数字,但我得到了相同的图片。
背后的数学是什么?我该如何随机gluLookAt(eyeX, eyeY, eyeZ, centerX, centerY, centerZ, upZ, upY, upZ)并将其更改为旋转和翻译并获得相同的图片?
2 个答案:
答案 0 :(得分:2)
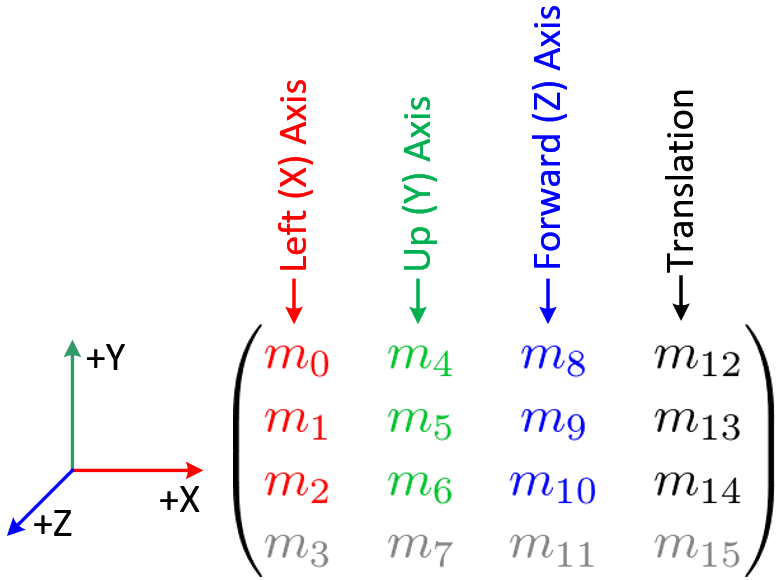
gluLookAt (...)设置视图空间的轴和原点。
在我看来,更容易考虑每个列所代表的内容,而不是将此操作转换为一系列翻译和轮换(尽管从根本上说就是这样)。
要设置视图空间的方向,gluLookAt (...)基本上计算各个轴。在 没有点 的情况下永远处理像glRotatef (...)这样的欧拉角度需要你做的事情。鉴于视图空间gluLookAt (...)产生的是正交的,仅从两个计算第三个轴是微不足道的。
- Z轴(向前)计算为从eye xyz 到center xyz 的方向
- Y轴(向上) 给予 直接作为向上 xyz
- X轴(右)计算为向上和向前矢量之间的 叉积
然后将这三个轴存储在矩阵X,Y,Z的列1-3中。
最后,由于观看变换除了旋转之外还有位置,因此摄像机的视点存储在矩阵的第4列。
请考虑以下来自Song Ho Ahn(안성호)的图表,OpenGL Transformation:
Axes Diagram http://www.songho.ca/opengl/files/gl_anglestoaxes01.png
{kind=link}
老实说,只是自己设置矩阵而不是处理欧拉角和glRotatef (...)更方便。
答案 1 :(得分:0)
我同意Andon的观点,即找到整个矩阵要容易得多。但是,如果您仍然需要找到glRotate和glTranslate的分解,那么您可以按照这些步骤操作,至少在此特定设置下。

我们需要找到一个转换,它将 xyz 坐标系中一个点的表示转换为 x'y'z'坐标系中的表示(不同于转变点)。这与将橙色系统与蓝色系统对齐相同。
关于这种转变,我们可以说两件事:
- y'z'= Uz'平面转换为 yz 平面。
- z'轴转换为 z 轴。
- 将原点 E 翻译为指向 C 。
- 顺时针旋转 y'轴90°以符合条件(2)。
- 顺时针旋转 z = z'轴45°以满足条件(1)。
要进行转换,我们会执行以下操作:
这可以概括为:
glRotatef(45, 0, 0, 1);
glRotatef(90, 0, 1, 0);
glTranslatef(-1, -1, 0);
- 如何使用glRotatef()和glTranslatef()在3D世界中逐步移动
- 在glRotatef和glTranslatef之后的opengl es位置
- OpenGL:gluLookAt:Sidestepping
- glMultMatrix / glLoadMatrix比glRotatef或glTranslatef更有效?
- 替代glRotatef和glutBitmapCharacter?
- OpenGL glTranslatef / glRotatef无法正常工作
- 从glLookAt()到glRotatef()和gltranslatef
- OpenGL / GLUT:glTranslatef和glRotatef在绘制立方体之前,还是之后?
- 如何在openGL中使用glTranslatef,glScalef,glRotatef
- 调用函数glTranslatef()/ glRotatef()之后是否需要重绘网格?
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?