жҲ‘жңҖеҲқеңЁOpenCVи®әеқӣдёҠеҸ‘еёғдәҶиҝҷдёӘпјҢдҪҶдёҚе№ёзҡ„жҳҜпјҢжҲ‘жІЎжңүеҫ—еҲ°еӨӘеӨҡзҡ„и§ӮзӮ№/еӣһеӨҚжүҖд»ҘжҲ‘еңЁиҝҷйҮҢеҸ‘её–пјҢеёҢжңӣжңүдәәеҸҜиғҪжңүжҢҮзӨәиҜ·дҪ е»әи®®еҗ—пјҹ
жҲ‘жӯЈеңЁдҪҝз”ЁBumblebee XB3з«ӢдҪ“зӣёжңәпјҢе®ғжңү3дёӘй•ңеӨҙгҖӮжҲ‘иҠұдәҶеӨ§зәҰдёүдёӘжҳҹжңҹйҳ…иҜ»и®әеқӣпјҢж•ҷзЁӢпјҢеӯҰд№ OpenCVд№Ұе’Ңе®һйҷ…зҡ„OpenCVж–ҮжЎЈпјҢдҪҝз”Ёз«ӢдҪ“еЈ°ж ЎеҮҶе’Ңз«ӢдҪ“еЈ°еҢ№й…ҚеҠҹиғҪгҖӮжҖ»д№ӢпјҢжҲ‘зҡ„й—®йўҳжҳҜжҲ‘з”ҹжҲҗдәҶдёҖдёӘеҫҲеҘҪзҡ„и§Ҷе·®еӣҫпјҢдҪҶжҳҜйқһеёёе·®зҡ„зӮ№дә‘пјҢзңӢиө·жқҘеғҸжҳҜеҒҸж–ң/иў«еҺӢжүҒпјҢ并且дёҚиғҪд»ЈиЎЁе®һйҷ…еңәжҷҜгҖӮ
еҲ°зӣ®еүҚдёәжӯўжҲ‘еҒҡдәҶд»Җд№Ҳпјҡ
дҪҝз”ЁOpenCV stereo_calibrationе’Ңstereo_matchingзӨәдҫӢпјҡ
дҪҝз”ЁеӣҪйҷ…иұЎжЈӢжЈӢзӣҳеӣҫеғҸж ЎеҮҶжҲ‘зҡ„з«ӢдҪ“зӣёжңә
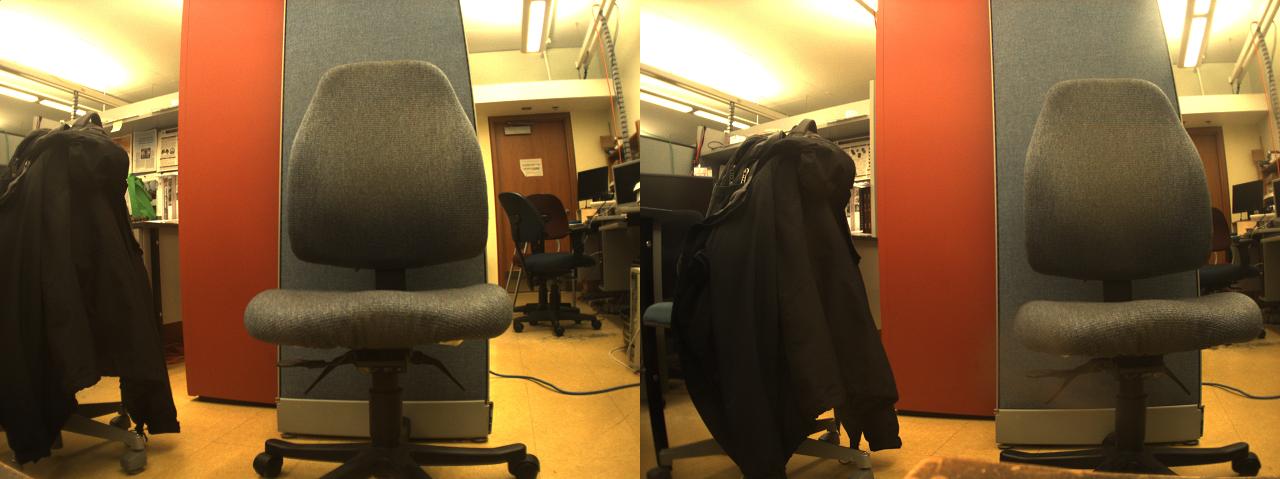
1пјүеҺҹе§ӢеңәжҷҜеӣҫеғҸпјҡhttp://answers.opencv.org/upfiles/1380850337241986.jpg
2пјүеңЁж‘„еғҸжңәж ЎеҮҶеҗҺдҪҝз”Ёзҹ©йҳөж ЎжӯЈд»Һж‘„еғҸжңәиҺ·еҫ—зҡ„еҺҹе§ӢеӣҫеғҸ
пјҡhttp://answers.opencv.org/upfiles/13808502665723237.png
3пјүдҪҝз”Ёз«ӢдҪ“еҢ№й…ҚпјҲSGBMпјүд»Һж ЎжӯЈеҗҺзҡ„еӣҫеғҸз”ҹжҲҗи§Ҷе·®еӣҫеғҸ
пјҡ
4пјүе°Ҷиҝҷдәӣе·®ејӮйў„жөӢдёә3DзӮ№дә‘
еҲ°зӣ®еүҚдёәжӯўжҲ‘жүҖеҒҡзҡ„е·ҘдҪңжҳҜж¶ҲйҷӨжҲ‘зҡ„й—®йўҳпјҡ
жҲ‘жҖҖз–‘й—®йўҳжҳҜпјҡ
жҲ‘зҡ„и§Ҷе·®еӣҫеғҸзңӢиө·жқҘзӣёеҜ№еҸҜжҺҘеҸ—пјҢдҪҶдёӢдёҖжӯҘжҳҜдҪҝз”ЁQзҹ©йҳөиҪ¬еҲ°3DзӮ№дә‘гҖӮжҲ‘жҖҖз–‘пјҢжҲ‘жІЎжңүжӯЈзЎ®ж ЎеҮҶзӣёжңәд»Ҙз”ҹжҲҗжӯЈзЎ®зҡ„Qзҹ©йҳөгҖӮдёҚе№ёзҡ„жҳҜпјҢжҲ‘жғіеҲ°дәҶжҲ‘иҝҳиғҪеҒҡдәӣд»Җд№ҲжқҘиҺ·еҫ—жӣҙеҘҪзҡ„Qзҹ©йҳөгҖӮжңүдәәеҸҜд»ҘжҸҗеҮәе»әи®®еҗ—пјҹ
жҲ‘и®ӨдёәеҸҜиғҪжңүй—®йўҳзҡ„еҸҰдёҖ件дәӢжҳҜжҲ‘еңЁдҪҝз”Ёcv :: stereoCalibrateеҮҪж•°ж—¶жүҖеҒҡзҡ„еҒҮи®ҫгҖӮзӣ®еүҚпјҢжҲ‘еҚ•зӢ¬ж ЎеҮҶжҜҸдёӘж‘„еғҸеӨҙд»ҘиҺ·еҫ—ж‘„еғҸеӨҙе’ҢеӨұзңҹпјҲcameraMatrix [0]пјҢdistCoeffs [0]е’ҢcameraMatrix [1]пјҢdistCoeffs [1]пјүзҹ©йҳөпјҢеӣ жӯӨе®ғдҪҝstereoCalibrateеҠҹиғҪзҡ„еӨҚжқӮжҖ§жӣҙе®№жҳ“дёҖдәӣгҖӮ
stereoCalibrate(objectPoints, imagePoints[0], imagePoints[1],
cameraMatrix[0], distCoeffs[0],
cameraMatrix[1], distCoeffs[1],
imageSize, R, T, E, F,
TermCriteria(CV_TERMCRIT_ITER+CV_TERMCRIT_EPS, 100, 1e-5),
//CV_CALIB_FIX_ASPECT_RATIO +
//CV_CALIB_ZERO_TANGENT_DIST +
//CV_CALIB_SAME_FOCAL_LENGTH +
CV_CALIB_RATIONAL_MODEL
//CV_CALIB_FIX_K3 + CV_CALIB_FIX_K4 + CV_CALIB_FIX_K5
);
жӯӨеӨ–пјҢжҲ‘и®ӨдёәжҸҗеҸҠжҲ‘д»Һе·®ејӮеҲ°зӮ№дә‘зҡ„ж–№ејҸеҸҜиғҪдјҡжңүжүҖеё®еҠ©гҖӮжҲ‘жӯЈеңЁдҪҝз”ЁOpenCVзҡ„cv :: reprojectImageTo3DпјҢ然еҗҺе°Ҷж•°жҚ®еҶҷе…ҘPCL Pointдә‘з»“жһ„гҖӮд»ҘдёӢжҳҜзӣёе…ід»Јз Ғпјҡ
cv::reprojectImageTo3D( imgDisparity16S, reconstructed3D, Q, false, CV_32F);
for (int i = 0; i < reconstructed3D.rows; i++)
{
for (int j = 0; j < reconstructed3D.cols; j++)
{
cv::Point3f cvPoint = reconstructed3D.at<cv::Point3f>(i, j);
//Filling in a PCL structure
pcl::PointXYZRGB point;
point.x = cvPoint.x;
point.y = cvPoint.y;
point.z = cvPoint.z;
point.rgb = rectified_imgRight.at<cv::Vec3b>(i,j)[0]; //Grey information
point_cloud_ptr->points.push_back (point);
}
}
point_cloud_ptr->width = (int) point_cloud_ptr->points.size();
point_cloud_ptr->height = 1;
pcl::io::savePCDFileASCII("OpenCV-PointCloud.pts", *point_cloud_ptr);
еҮ дёӘй—®йўҳпјҡ
дҪ иғҪеё®жҲ‘еҲ йҷӨдјјд№ҺжҳҜзӮ№дә‘дёҖйғЁеҲҶзҡ„еӣҫеғҸ/е·®ејӮе№ійқўеҗ—пјҹдёәд»Җд№Ҳдјҡиҝҷж ·пјҹ
жңүд»Җд№ҲжҳҺжҳҫжҲ‘еҒҡй”ҷдәҶеҗ—пјҹжҲ‘дјҡеҸ‘еёғжҲ‘зҡ„д»Јз ҒпјҢдҪҶе®ғдёҺжҸҗдҫӣзҡ„OpenCVзӨәдҫӢйқһеёёзӣёдјјпјҢжҲ‘и®ӨдёәжҲ‘жІЎжңүжӣҙжңүеҲӣж„Ҹең°еҒҡд»»дҪ•дәӢжғ…гҖӮеҰӮжһңжңүдёҖдёӘзү№е®ҡзҡ„йғЁеҲҶеҸҜиғҪдјҡеј•иө·е…іжіЁпјҢжҲ‘еҸҜд»ҘгҖӮ
еңЁжҲ‘зҡ„еӨ©зңҹзңӢжқҘпјҢдјјд№Һе·®ејӮеӣҫеғҸжҳҜеҸҜд»Ҙзҡ„гҖӮдҪҶзӮ№дә‘з»қеҜ№дёҚжҳҜжҲ‘жүҖжңҹжңӣзҡ„зӣёеҜ№дёҚй”ҷзҡ„е·®ејӮеӣҫеғҸпјҢе®ғжӣҙзіҹзі•гҖӮ
еҰӮжһңжңүеё®еҠ©зҡ„иҜқпјҢжҲ‘е·Із»ҸжҸҗеҲ°дәҶзӣёжңәж ЎеҮҶеҗҺеҫ—еҲ°зҡ„Qзҹ©йҳөпјҢеҸҜиғҪдјҡеҮәзҺ°жҳҺжҳҫи·іи·ғзҡ„й—®йўҳгҖӮе°Ҷе…¶дёҺLearning OpenCVеӯҰд№ д№ҰзӣёжҜ”иҫғпјҢжҲ‘и®ӨдёәжІЎжңүд»»дҪ•жҳҺжҳҫдёҚжӯЈзЎ®зҡ„еҶ…е®№......
Q: rows: 4
cols: 4
data: [ 1., 0., 0., -5.9767076110839844e+002, 0., 1., 0.,
-5.0785438156127930e+002, 0., 0., 0., 6.8683948509213735e+002, 0.,
0., -4.4965180874519222e+000, 0. ]
ж„ҹи°ўйҳ…иҜ»пјҢжҲ‘дјҡиҜҡе®һең°ж„ҹи°ўд»»дҪ•е»әи®®......
зӯ”жЎҲ 0 :(еҫ—еҲҶпјҡ0)
жҲ‘еңЁдҪҝз”ЁOpenCVпјҲv.2.4.6пјү3DйҮҚе»әеҠҹиғҪж—¶еҸ‘зҺ°дәҶзұ»дјјзҡ„й—®йўҳгҖӮ жңүдәӣдәәпјҢжҜ”еҰӮ马дёҒВ·дҪ©йҮҢж–ҜпјҢе·Із»ҸиҮӘе·ұеҶҚж¬Ўе®һж–ҪдәҶгҖӮ http://blog.martinperis.com/2012/01/3d-reconstruction-with-opencv-and-point.html
еҸҜжӮІзҡ„жҳҜпјҢжңүж—¶жҲ‘еңЁдҪҝз”ЁжҲ‘зҡ„ж•°жҚ®зҡ„дёӨдёӘе®һзҺ°дёӯйғҪеҸ‘зҺ°дәҶй—®йўҳгҖӮ жүҖд»ҘпјҢжҲ‘и®ӨдёәеңЁиҝҷдәӣжғ…еҶөдёӢжҲ‘зҡ„й—®йўҳжҳҜз”ұдәҺеӨ–йғЁзӣёжңәеҸӮж•°жҸҸиҝ°дёҚдҪійҖ жҲҗзҡ„гҖӮд№ҹи®ёпјҢиҝҷд№ҹжҳҜдҪ зҡ„жғ…еҶөгҖӮ пјҡ -
PSгҖӮдёәдәҶж‘Ҷи„ұиғҢжҷҜдҪ йңҖиҰҒз»ҶеҲҶе®ғгҖӮжҲ–иҖ…пјҢиҮіе°‘еңЁйҮҚе»әе·ҘдҪңеҗҺжЈҖжҹҘеӨ§дәҺйҳҲеҖјзҡ„ж·ұеәҰеҖјгҖӮ handleMissingValuesж Үеҝ—еҸӘж¶ҲйҷӨвҖңж— йҷҗвҖқзӮ№ PS2гҖӮиҜ·е‘ҠиҜүжҲ‘们жӮЁжҳҜеҗҰи§ЈеҶідәҶиҝҷдёӘй—®йўҳгҖӮжҲ‘и®ӨдёәиҝҷеҜ№жүҖжңүзӨҫеҢәйғҪжңүд»·еҖјгҖӮж—ҘThnx
{kind=link}
{kind=link}