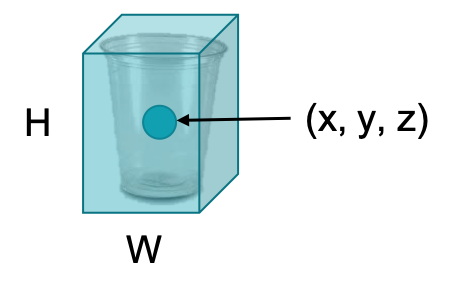
目标。要估算中心的3D位置(x,y,z),玻璃的宽度(玻璃的较大直径)和高度。与this drawing中类似。输入是两张图像,一张来自一台不同的相机(here和here)。
设置。图像来自两个固定和校准的(已知的固有和非固有参数)相机。
我的尝试。
问题。这些点不是实际的对应关系,因此重投影不准确,然后度量也不准确(导致最大3cm的误差)。请注意,如果我手动选择两个图像上的相应像素,然后进行三角剖分,则会得到大约0.1cm的误差。
您能指导我如何(更好地)解决此问题吗?
谢谢!
PS:我正在使用python和OpenCV。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}