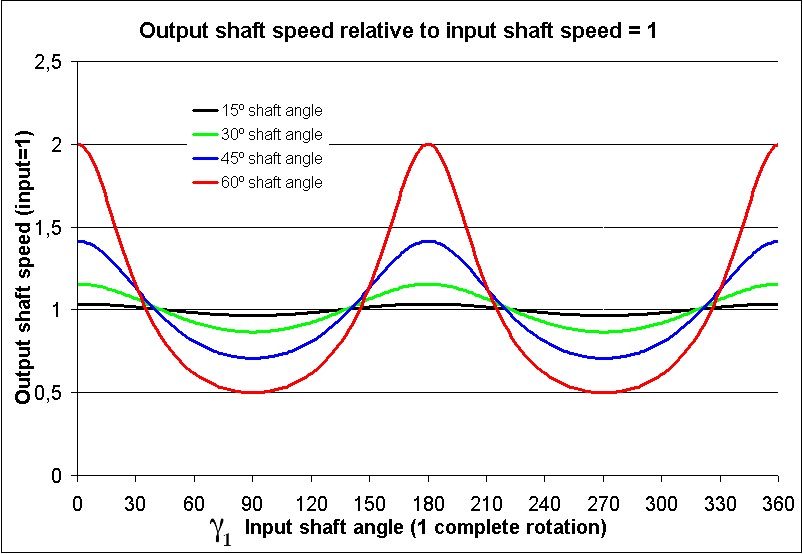
绘制万向节的相对角速度
我试图绘制Universal Joint相对于其输入天使的输出角速度,我称之为phi(在phi = landa_1上方的链接中)。 我正在使用MATLAB进行此操作
请注意链接中符号的翻译以及我的代码:
beta = Beta,phi = landa_1,Omega_2 = Omega_B,Omega_1 = Omega_A
这是我的代码:
clear all, close all, clc
phi=0:360; % one rotation of the input shaft
Beta=60;
Omega_A=1;
Omega_B=(Omega_A*cos(Beta))./(1-((sin(Beta))^2)*((cos(phi)).^2))
plot(phi,Omega_B,'LineWidth',2), grid on
但是!情节不是it should look like(在上面的链接中可用) My current plot
{kind=link}
{kind=link}
1 个答案:
答案 0 :(得分:2)
您需要将度数转换为弧度才能使用sin和cos。所以
clear all, close all, clc
phi=0:360; % one rotation of the input shaft
Beta=60;
Omega_A=1;
Omega_B=(Omega_A*cos(Beta/180*pi))./(1-((sin(Beta/180*pi))^2)*((cos(phi/180*pi)).^2))
plot(phi,Omega_B,'LineWidth',2), grid on
输出:

相关问题
最新问题
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?