这个问题困扰了我好几天,所以我决定请你帮忙。
我正在阅读Jack B. Kuipers所写的“Quaternions and Rotation Sequence”一书。在6.4节中,作者推导出一个复合旋转四元数的公式。我很难理解这种推导的一个步骤。
我想简要描述推导过程如下:
考虑this picture中的跟踪问题。
(对不起,我必须使用链接而不是直接发布图片,因为这是我第一次在这里发帖,所以我还没有资格这样做)
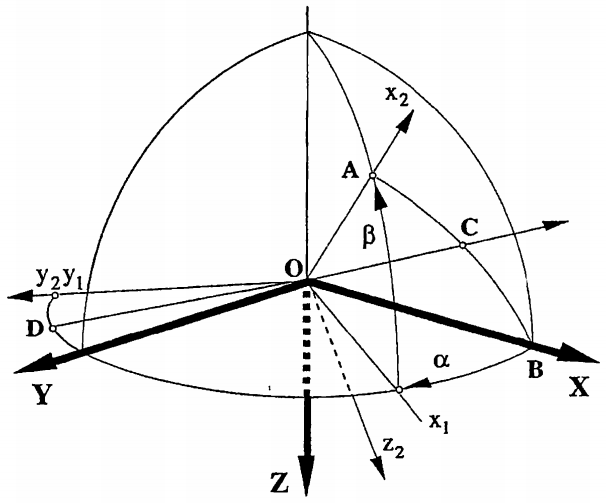
在图片中,XYZ是一个全局参考框架。进行2次连续旋转: 第一个是围绕Z轴旋转角度α,将帧XYZ变换为新的帧x1y1z1。 第二个是围绕y1轴旋转角度β,将帧x1y1z1转换为新帧x2y2z2。
目标是找到一个复合旋转四元数,它相当于上面的两个旋转。
作者这样做如下。第一个旋转可以用以下四元数p表示:
p = cos(alpha / 2)+ k * sin(alpha / 2)(1)
在此公式中, k 是标准基础向量(我们有向量 i , j , k 在R3中分别对应于轴x,y,z)。
第二次旋转可以用以下四元数q表示:
q = cos(beta / 2)+ j * sin(beta / 2)(2)
我们正在寻找的复合四元数是这两个四元数的乘积:qp。该产品的配方位于this picture。
为了推导出这个最终公式,作者使用了2个关于标准基矢量 i , j , k 的假设,它们是: kj = 0且 k x j = - i 。这是我不明白的地方。
我们都知道,对于一组3个相互正交的向量 i , j , k ,上述2个假设是正确的。但是,(1)中的向量 k 和(2)中的向量 j 不属于同一坐标系。换句话说,(1)中的 k 对应于帧XYZ中的Z,并且(2)中的 j 对应于x1y1z1中的y1。这些是两个不同的区分框架,所以我认为作者使用的第二个假设是不正确的。
您如何看待这个?任何答案将不胜感激。谢谢。
答案 0 :(得分:0)
作者使用关于标准基础向量i,j,k的2个假设...
这不是假设! 你不明白跨产品和点产品看到 http://en.wikipedia.org/wiki/Cross_product http://en.wikipedia.org/wiki/Dot_product
3个相互正交的向量i,j,k
正交向量....它是什么(定义)? Dot_product ......它是什么(定义)? 我们可以通过Dot_product定义正交向量吗?
在理解四元数之前,您必须学习线性代数和复杂分析的基础知识。
{kind=link}
{kind=link}