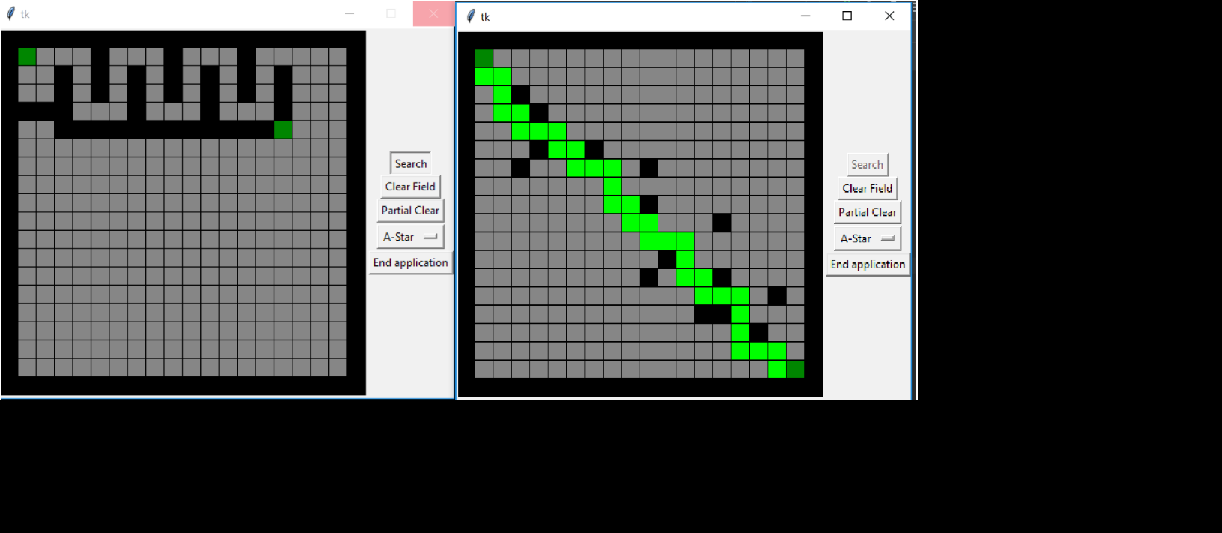
对于大学的一个项目,我想编程一个探路者,该探路者使用a星级来找到从终点到目标的最佳方法。 对于几乎直线,该算法运行良好。当创建障碍物并且必须转弯时,算法会遇到问题,程序将无法找到路径。 我想尝试使该场景工作在左侧显示,但是到目前为止,我还没有找到令人满意的解决方案。
对于算法和GUI,您还可以转到https://github.com/NiklasB1337/PathFinder1.1
左侧显示了发生问题的位置: https://i.gyazo.com/4488e22ad5610c81061e682514524ed2.png
# Astar
def astar(self, maze, start, end):
"""Returns a list of tuples as a path from the given start to the given end in the given maze"""
# Create start and end node
start_node = Node(None, start)
start_node.g = start_node.h = start_node.f = 0
end_node = Node(None, end)
end_node.g = end_node.h = end_node.f = 0
# Initialize open and closed list
open_list = []
closed_list = []
# Add the start node
open_list.append(start_node)
# Loop until the end is found
while len(open_list) > 0:
# get the current node
current_node = open_list[0]
current_index = 0
for index, item in enumerate(open_list):
if item.f < current_node.f:
current_node = item
current_index = index
# pop current off open list, add to closed list
open_list.pop(current_index)
closed_list.append(current_node)
# finding the goal
if current_node == end_node:
path = []
current = current_node
while current is not None:
path.append(current.position)
current = current.parent
return path[::-1] # Return reversed path
# generate children
children = []
for new_position in [(0, -1), (0, 1), (-1, 0), (1, 0)]: # Adjacent squares
# get node position
node_position = (current_node.position[0] + new_position[0], current_node.position[1] + new_position[1])
# make sure the node is within range
if node_position[0] > (len(maze) - 1) or node_position[0] < 0 or node_position[1] > (
len(maze[len(maze) - 1]) - 1) or node_position[1] < 0:
continue
# make sure the terrain is walkable
if maze[node_position[0]][node_position[1]] != 0:
continue
# create new node
new_node = Node(current_node, node_position)
# Append
children.append(new_node)
# loop through children
for child in children:
# child is on the closed list
for closed_child in closed_list:
if child == closed_child:
continue
#cCreate the f, g, and h values
child.g = current_node.g + 1
child.h = ((child.position[0] - end_node.position[0]) ** 2) + (
(child.position[1] - end_node.position[1]) ** 2)
child.f = child.g + child.h
# child is already in the open list
for open_node in open_list:
if child == open_node and child.g > open_node.g:
continue
# add the child to the open list
open_list.append(child)
答案 0 :(得分:0)
仅查看图像,似乎开始或结束处在障碍物上,无法到达。如果它是左上角的起始块,则对邻居的第一次扫描将不会返回任何内容。 ?
{kind=link}