标签: math camera computer-vision camera-calibration
我正在寻找一种方法来找到相机拍摄的图像中某点的(x,y)像素位置。我知道对象的物理位置(距离-宽度,高度和深度),图像的分辨率以及焦距(也许我还可以得到其他一些相机参数-但我想要的信息越少越好)。
如果我不清楚,我希望将公式/算法/过程从(宽度,高度,深度)映射到(x_pixel_position_in_image,y_pixe_position_in_image),以将物理坐标与像素坐标相连接。
非常感谢您。
答案 0 :(得分:0)
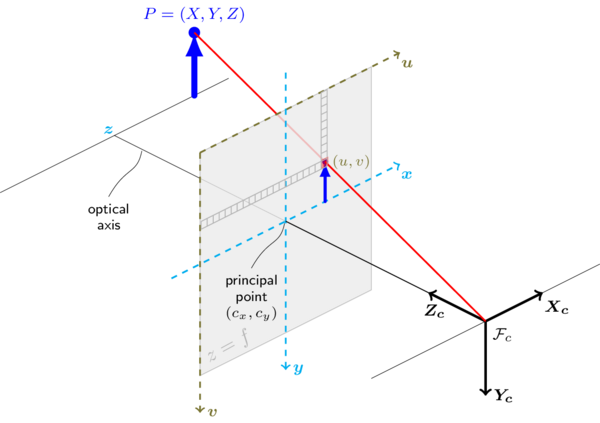
如果您查看下面链接的图,则使用相机对3d点的透视投影取决于两个主要信息来源。
Diagram
相机参数(本征)以及相机在固定世界坐标中的位置(本征)。由于要在摄像机坐标系中投影点,因此可以假定世界坐标与摄像机重合。因此,外部矩阵[R | t]可以表示为
R =眼睛(3);并且t = [0; 0; 0]。
因此,您只需要了解相机参数(焦距和光学中心位置)即可。您可以了解有关此here的更多信息。
{kind=link}