分离图像中的对象
我正在尝试计算图像中的对象并且我编写的MATLAB脚本运行良好但有些对象正在触摸(在其他图像中它们甚至是重叠的)并且它只计算一个对象而不是两个。我试图使用与分水岭函数关联的bwdist函数来分隔这些对象,但它不能很好地工作。它会在不应该的地方切割我的物体,而且计数会更糟。
如果有人可以解释我如何继续分离好的粒子(我的图像右侧的2个触摸),我将不胜感激。
这是图片:

这是我的代码(如果你运行它会出现很多数字):
很抱歉用法语= P
撰写评论clear all;
k=1; % indice pour la numérotation des images
I=imread('Images particules/DSC_0037.jpg');
figure(k)
k=k+1;
imshow(I);
I_hsv=rgb2hsv(I);
figure(k)
k=k+1;
imshow(I_hsv);
I_h=I_hsv(:,:,1);
I_s=I_hsv(:,:,2);
I_v=I_hsv(:,:,3);
figure(k)
k=k+1;
imshow(I_h)
figure(k)
k=k+1;
imshow(I_s)
figure(k)
k=k+1;
imshow(I_v)
%% Hue
[Gx, Gy] = imgradientxy(I_h);
[Gmag, Gdir] = imgradient(Gx, Gy);
% figure(k);
% k=k+1;
% imshowpair(Gmag, Gdir, 'montage');
I_bw1=Gmag>mean(quantile(Gmag,0.99));
figure(k);
k=k+1;
imshowpair(Gmag,I_bw1,'montage');
%% Saturation
[Gx, Gy] = imgradientxy(I_s);
[Gmag, Gdir] = imgradient(Gx, Gy);
% figure(k);
% k=k+1;
% imshowpair(Gmag, Gdir, 'montage');
I_bw2=Gmag>mean(quantile(Gmag,0.99));
figure(k)
k=k+1;
imshowpair(Gmag,I_bw2,'montage');
%% Variance
[Gx, Gy] = imgradientxy(I_v);
[Gmag, Gdir] = imgradient(Gx, Gy);
% figure(k);
% k=k+1;
% imshowpair(Gmag, Gdir, 'montage');
I_bw3=Gmag>mean(quantile(Gmag,0.99)); % choisir le bon quantile
figure(k)
k=k+1;
imshowpair(Gmag,I_bw3,'montage');
%% Addition images du gradient
I_recomp=I_bw1+I_bw2+I_bw3;
figure(k);
k=k+1;
imshow(I_recomp);
%% Dilatation - fill - erosion
% Element structurant diamond
% Dilatation
SE=strel('octagon',3); % doit être un multiple de 3 !
I_dil=imdilate(I_recomp,SE);
% figure(k)
% k=k+1;
% imshow(I_dil);
% Fill
I_fill=imfill(I_dil,'holes');
% Erosion
I_er=imerode(I_fill,SE);
% figure(k)
% k=k+1;
% imshow(I_er);
%% Elimination du bruit en appliquant un imerode <taille minimale des plastiques en pixels
% Erosion - dilatation
SE=strel('octagon',6); % mesurer la taille maximale d'un plastic en pixel avec imdistline !
I_bruit=imdilate(imerode(I_er,SE),SE);
figure(k)
k=k+1;
imshow(I_bruit);
%% Séparation des particules avec watershed
I_bwdist=-bwdist(~I_bruit);
figure(k);
k=k+1;
imshow(I_bwdist,[]);
I_water=watershed(I_bwdist);
I_bruit(I_water==0)=0;
figure(k);
k=k+1;
imshow(I_bruit);
%% Comptage des particules
cc=bwconncomp(I_bruit);
cc.NumObjects
L=labelmatrix(cc);
RGB_label=label2rgb(L);
figure(k);
k=k+1;
imshow(RGB_label);
2 个答案:
答案 0 :(得分:3)
这是一个不小的问题,有很多可能的解决方案。
注意:我的代码中没有使用imgradientxy和imgradient,因为我的matlab版本太旧了(R2011b)。
在我看来,至少有两件必要的事情要做:
-
将背景与其他物体分开。在这种情况下,我使用Otsu阈值处理的这种实现(在具有四级阈值的HSV通道中转换的图像上执行):
http://www.mathworks.com/matlabcentral/fileexchange/26532-image-segmentation-using-otsu-thresholding
它可能有助于不同的颜色背景。
-
单独分析每个对象以避免干扰。 可以执行不同类型的分析:
-
数学形态学操作:
imerode/imdilate -
纹理分割(gabor滤波器,熵,同质性或强度级别)。这里有一些例子:
http://it.mathworks.com/help/images/image-segmentation-1.html
另请参阅gabor过滤器分段指南以及包含示例和概念的页面。
-
我个人首先执行imerode / imdilate个操作阶段来切片初始对象。
我认为最好擦除太小的子对象:
- 带有额外的侵蚀通道,使用小结构元素
-
bwareaopen占初始对象总面积的一小部分。
如果仍然存在任何子对象,则应该可以使用上面列出的技术之一更好地分离子对象。
我使用数学形态学(侵蚀有点慢),Otsu分割,图像差异,最终bwselect来控制结果。
这是我的代码和输出。
clear all;
close all;
clc;
n_level = 4;
channel_n = 2;
R1_perc = 1 / 8;
R2_perc = 5 / 100;
area2_perc = 2 / 100;
R3_small = 1;
I = imread('~/Downloads/25443957.jpg');
I_hsv = rgb2hsv(I);
% % indentify image background as the object with greatest area
% original Otsu implementation
Ihsv_otsu = otsu(I_hsv, n_level);
areas_extension = zeros(1, n_level);
for x = 1:n_level
img_area_object = Ihsv_otsu == x; % img_zona = (Ihsv_otsu_bwl==n);
areas_extension(1, x) = bwarea(img_area_object);
end
[background_val, background_idx] = max(areas_extension);
Ihsv_otsu_filled = imfill(Ihsv_otsu ~= background_idx, 'holes');
% % divide et impera
% analyze the objects one by one
Ihsv_otsu_bwl = bwlabel(Ihsv_otsu_filled);
img_morph = zeros(size(Ihsv_otsu_bwl));
img_eroded = zeros(size(Ihsv_otsu_bwl));
SE1px1 = strel('disk', 1);
SE3small = strel('disk', R3_small);
fprintf('start loop MORPH, Operations:: erosion & dilate...\n')
for n = 1:max(unique(Ihsv_otsu_bwl))
fprintf('morph loop... iter:%d\n', n)
img_zona = Ihsv_otsu_bwl == n;
temp = regionprops(img_zona, 'MinorAxisLength');
minoraxis = temp.MinorAxisLength;
img_zona_out = img_zona;
R = ceil(minoraxis * R1_perc); % use 'ceil', not 'round', to avoid R<1 processing small regions
SE2R1 = strel('disk', R);
CC = bwconncomp(img_zona_out, 8);
k = 0;
while CC.NumObjects == 1
img_zona_out = imerode(img_zona_out, SE2R1);
CC = bwconncomp(img_zona_out, 8);
k = k + 1;
% %% it is possible to erode with size~1-pixel object or not
% if CC.NumObjects>1
% fprintf('FOUND! iter:%d, c_EROSION:%d, n_Obj:%d\n', n, k, CC.NumObjects)
% elseif CC.NumObjects==0
% fprintf('BREAK! iter:%d, c_EROSION:%d, n_Obj:%d\n', n, k, CC.NumObjects)
% break
% %elseif CC.NumObjects==1
% % fprintf('keep carry on... iter:%d, c_EROSION:%d, n_Obj:%d\n', n, k, CC.NumObjects)
% end
if CC.NumObjects > 1
img_zona_out = imerode(img_zona_out, SE3small);
CC = bwconncomp(img_zona_out, 8);
if CC.NumObjects > 1
fprintf('FOUND! iter:%d, c_EROSION:%d, n_Obj:%d\n', n, k, CC.NumObjects)
elseif CC.NumObjects == 0
% fprintf('BREAK! iter:%d, c_EROSION:%d, n_Obj:%d\n', n, k, CC.NumObjects)
break
end
end
end
% %% post-erosion:
% if the object number is 0, drop the eroded image and mantain the pre-eroded image
if CC.NumObjects == 0
img_morph = imadd(img_morph > 0, img_zona);
img_eroded = imadd(img_eroded > 0, img_zona);
continue
% if the object number is greater than 1, dilate the objects until
% they touch, when the CC.NumObjects is 1
elseif CC.NumObjects > 1
k = 0;
img_zona_dilate = img_zona_out;
while CC.NumObjects > 1
k = k + 1;
img_zona_old = img_zona_dilate;
% a small radius is better for a uniform expansion
img_zona_dilate = imdilate(img_zona_dilate, SE3small);
CC = bwconncomp(img_zona_dilate > 0, 8);
if CC.NumObjects == 1
% %% results the last objects immediatly before they touch
img_eroded = imadd(img_eroded > 0, img_zona_old);
fprintf('UNITED! iter:%d, c_DILATE:%d, n_n_Obj:%d\n\n', n, k, CC.NumObjects)
end
end
% modified Otsu function (otsuSeparation.m)
img_splitted = otsuSeparation(I_hsv, img_zona, channel_n, R2_perc, area2_perc);
img_morph = imadd(img_morph > 0, img_splitted > 0);
elseif CC.NumObjects == 1
fprintf('# only one object... strange at this point.\n#')
fprintf('# iter:%d, c_DILATE:%d, CC.NumObjects:%g\n', n, k, CC.NumObjects)
end
end
% %
fprintf('start loop BWSELECT:: img_morph & img_eroded...\n')
img_eroded_bwl = bwlabel(img_eroded);
img_result = zeros(size(img_eroded_bwl));
for X = 1:max(unique(img_eroded_bwl))
fprintf('# BWSELECT, iter:%d\n', X)
obj2select = img_eroded_bwl == X;
centr = regionprops(obj2select, 'centroid');
xc = round(centr.Centroid(1));
yc = round(centr.Centroid(2));
temp = bwselect(img_morph, xc, yc);
img_result = imadd(img_result > 0, temp);
end
img_result = img_result > 0;
%%
close all
figure('Name', 'morph', 'NumberTitle', 'off', 'WindowStyle', 'docked');
imagesc(img_morph)
figure('Name', 'erodeed', 'NumberTitle', 'off', 'WindowStyle', 'docked');
imagesc(img_eroded)
figure('Name', 'hsv', 'NumberTitle', 'off', 'WindowStyle', 'docked');
imagesc(I_hsv)
figure('Name', 'image', 'NumberTitle', 'off', 'WindowStyle', 'docked');
imagesc(I)
figure('Name', 'result', 'NumberTitle', 'off', 'WindowStyle', 'docked');
imagesc(img_result)
这里是我对Otsu函数的修改,OtsuSeparation.m。
function [img_splitted] = otsuSeparation(I, bw, channel_n, R2_perc, area2_perc)
img_splitted = zeros(size(bw));
SE1px1 = strel('disk', 1);
% fprintf('start loop: Otsu segmentation...\n')
% for Y=1:max(unique(img_bwl)) %for Y=41:41
% fprintf('# OtsuSep: iter:%d\n', Y)
% bw = img_bwl==Y;
img_channel = I(:, :, channel_n);
img_channel(bw == 0) = 0;
% image segmentation by intensity
img_channel_otsu = otsu(img_channel);
% processing "BW" to avoid multiple objects and use only one valor for MinorAxisLength
temp2 = regionprops(bw, 'MinorAxisLength', 'Area');
R2 = ceil(temp2.MinorAxisLength * R2_perc);
area2 = ceil(temp2.Area * area2_perc);
SE3R2 = strel('disk', R2);
% %% PART1: cleaning principal object selected by Otsu segmentation
% removing small objects external to main selection with bwareaopen to
% avoid modification at object contours
img_part1 = bwareaopen(img_channel_otsu > 1, area2, 8);
img_part1 = imfill(img_part1, 'holes');
% execting imdilate to avoid intersection between PART1 and PART2 complements
img_part1 = imdilate(img_part1, SE3R2);
img_complement1 = imcomplement(img_part1);
% %% PART2: cleaning external area around PART1 object
% execting imerode to avoid intersection between PART1 and PART2 complements
img_bw_eroded = imerode(bw, SE3R2);
img_complement2 = imcomplement(img_bw_eroded);
img_part2 = img_complement1 - img_complement2;
img_part2 = bwareaopen(img_part2 > 0, area2, 8);
% dilate (after erosion) to restore original object size and morphology
img_part2 = imdilate(img_part2, SE3R2);
% securing a well-done separation between objects
img_intersez = imadd(img_part1, img_part2) > 1;
img_intersez = imdilate(img_intersez, SE1px1);
% use manual substraction here instead of imabsdiff for a good separation
img_part1 = (img_part1 - img_intersez) > 0;
img_part2 = (img_part2 - img_intersez) > 0;
img_splitted = imadd(img_splitted, imadd(img_part1, img_part2));
当然可以执行不同的选择。 为了提高准确性,可能需要尝试使用少量样本图像的算法,并使用不同图像的对照组进行测试。
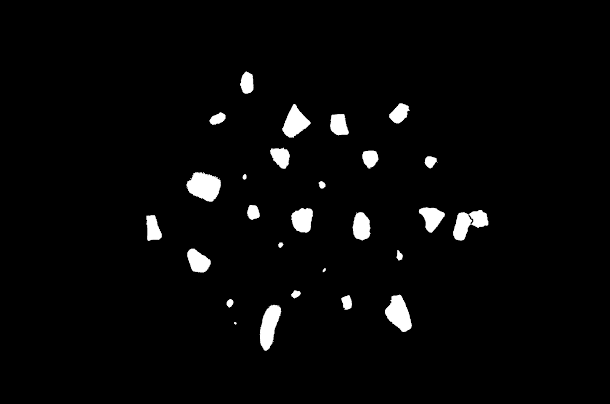
这是我的输出。
灰度bwlabel(彩色版):
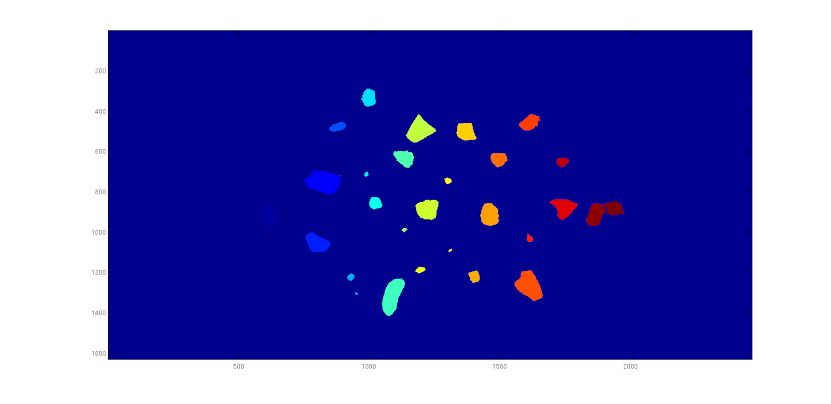
灰度bwlabel(matlab原始图片):
<强>更新: 我的代码需要改进。在“immelate after imerode”阶段,我认为二进制对象应该分为两部分。为了改进算法,还可以使用边缘检测:
http://robotics.eecs.berkeley.edu/~sastry/ee20/index.html
http://it.mathworks.com/help/coder/examples/edge-detection-on-images.html
http://www.mathworks.com/matlabcentral/fileexchange/45459-canny-edge-detection-in-2-d-and-3-d
有关图像分割的其他常规资源:
https://en.wikipedia.org/wiki/Outline_of_object_recognition
http://it.mathworks.com/help/images/object-analysis.html
http://it.mathworks.com/help/images/texture-analysis-1.html
http://it.mathworks.com/help/images/image-segmentation-1.html
答案 1 :(得分:0)
细分始终是一个难题。一般来说很难回答什么是解决问题的最佳方法,我想在每个图像中重叠的粒子看起来会有所不同。您可以使用形状,颜色,纹理,先验知识(训练)等。您的数据可能会决定最佳效果
我将在这里描述一种根据粒子形状分离触摸粒子的简单方法,称为watershed separation。 该过程以二进制图像(您已通过阈值处理获得)开始。然后你会计算距离图(bwdist)。然后,一个选项是逐步dilate ultimately eroded points,直到它们遇到用于形成分离片段的黑色像素。
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?