无法检测特定颜色的对象(RGB / HSV / HSL)
我的目标是探测GTA Vice City的车道。 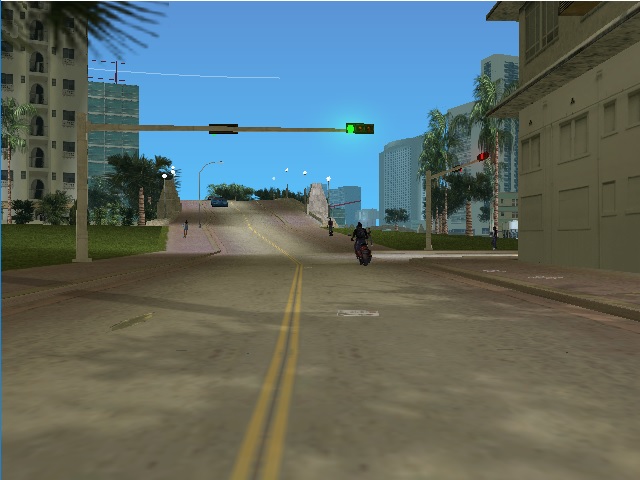
当我在绘画上分析这张照片时,这些线条就像RGB色彩空间中的[120,100,45]。当我用cv2.inRange应用它时,我无法得到奇怪的结果。我不知道该怎么做,也不知道为什么它没有向我展示这种黄色(实际上看起来像黄色)车道的任何迹象。
EDIT1:
我发现只获取这些行的值,它们是: 低:0,110,0 鞋面:160,195,80
以下是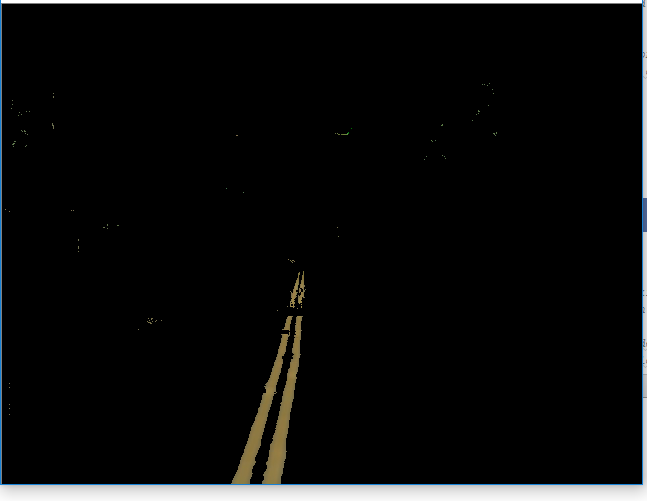
但是,当我尝试使用ImageGrab模块(在canny和gaussblur之后)在实时播放中获得此行时,我得到:
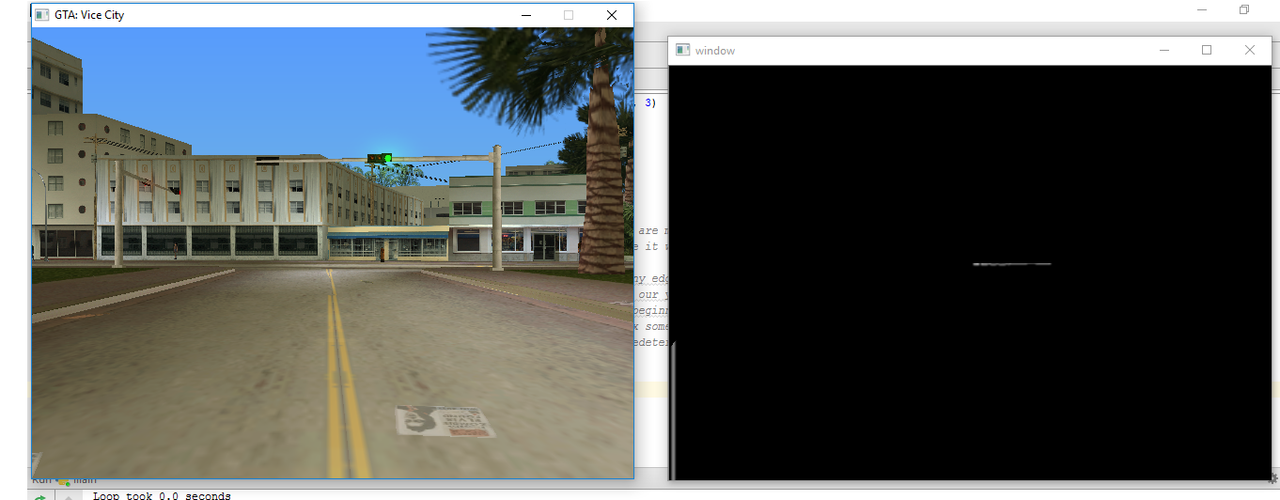
我的目标是用HoughProbabilistic绘制车道,但是,我不能看到连续的线条,即使每次现场演奏都没有线路。我很困惑,这里是代码:
def process_img(image):
lower_yellow = np.array([0, 110, 0])
upper_yellow = np.array([160, 195, 80])
# yellow color mask
processimagehsl = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
yellow_mask = cv2.inRange(processimagehsl, lower_yellow, upper_yellow) # and we are masking it
masked = cv2.bitwise_and(image, image, mask=yellow_mask) # and then we combine it with original image
# turned into gray
processimagecanny = cv2.Canny(masked, threshold1=150,
threshold2=300) # with canny edge detection method, we detect edges
# of only our yellow lines' edges. We used masking
# at the beginning of the code because of this.
processimagegauss = cv2.GaussianBlur(processimagecanny, (5, 5), 0) # This'Ll fix some in order to avoid noises
processedimage = regionofinterest(processimagegauss) # Let's get back to our predetermined region
lines = cv2.HoughLinesP(processedimage, 1, np.pi / 180, 180, 0, 0)
return processedimage
解决
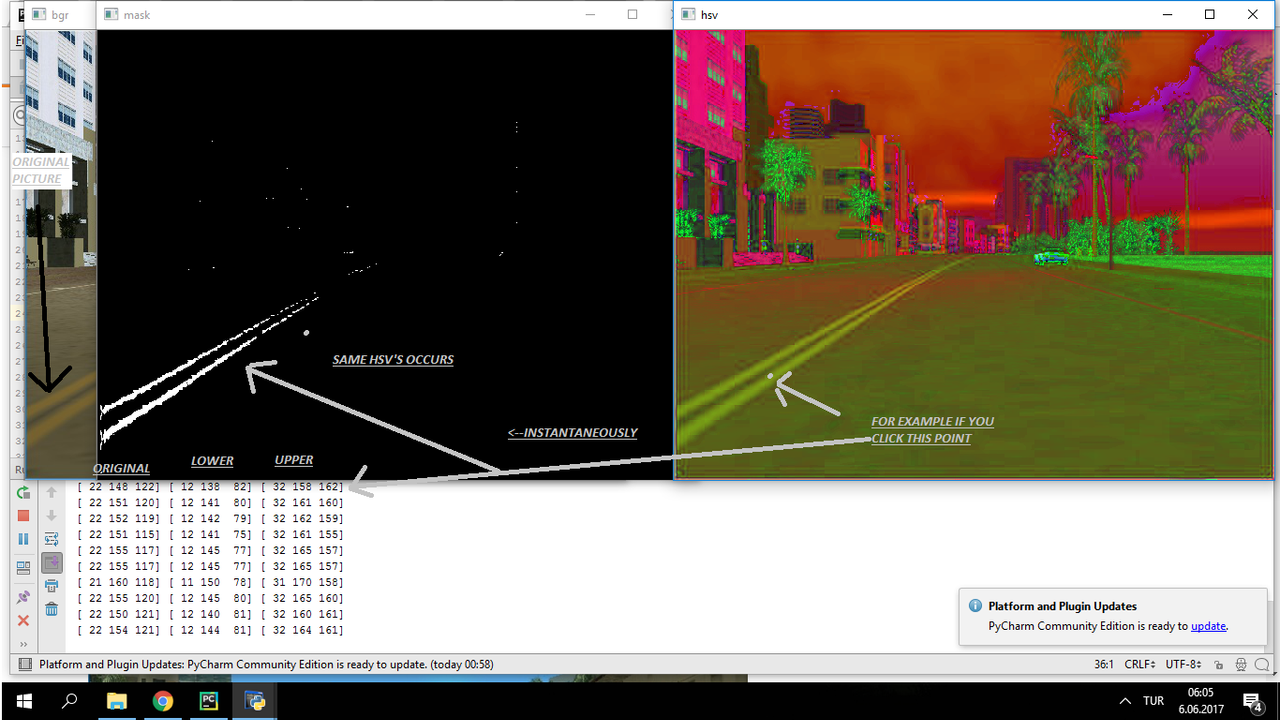
您可以在OpenCv上使用此应用程序选择范围,这里是链接:http://answers.opencv.org/question/134248/how-to-define-the-lower-and-upper-range-of-a-color/
以下是解释的内容:
1 个答案:
答案 0 :(得分:2)
您错过cv2.HoughLinesP()中的第五个参数lines。位置参数期望订单:
cv2.HoughLinesP(image, rho, theta, threshold[, lines[, minLineLength[, maxLineGap]]])
你可以用两种方法解决这个问题;要么使用None,要求lines参数:
lines = cv2.HoughLinesP(image, rho, theta, threshold, None, minLineLength, maxLineGap)
或调用您想要使用的所有可选参数及其密钥:
lines = cv2.HoughLinesP(image, rho, theta, threshold=..., minLineLength=..., maxLineGap=...)
相关问题
最新问题
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?