еҰӮдҪ•жЈҖжөӢжңҖеӨ§зҹ©еҪўиҪ®е»“еҶ…зҡ„ж Үи®°й»‘иүІеҢәеҹҹпјҹ
жҲ‘еҸҜд»ҘеңЁзӯ”жЎҲзәёдёҠжЈҖжөӢеҲ°жңҖеӨ§иҪ®е»“пјҲ20дёӘй—®йўҳпјҢжҜҸдёӘйғҪжңү4дёӘжӣҝд»Јпјү
з»ҳеҲ¶жңҖеӨ§иҪ®е»“еҗҺпјҢжҲ‘иҜҘжҖҺд№ҲеҠһпјҹе°Ҷзҹ©еҪўеҲ’еҲҶдёә20x4зҡ„зҹ©еҪўпјҹжҲ–иҖ…еҶҚж¬ЎжүҫеҲ°countourдҪҶиҝҷж¬ЎжҳҜеңЁзҹ©еҪўеҶ…пјҹжҲ‘дёҚзҹҘйҒ“жҲ‘йңҖиҰҒд»Җд№ҲгҖӮеҸӘжҳҜжҲ‘жғіеҫ—еҲ°е“ӘдёӘж Үи®°гҖӮ
жҲ‘зңӢдәҶthis documantгҖӮ
еҰӮдҪ•зј–еҶҷвҖңеӣҫеғҸзҪ‘ж јеҲ’еҲҶвҖқпјҹ

public View onCreateView(LayoutInflater inflater, ViewGroup container,
Bundle savedInstanceState) {
View _view = inflater.inflate(R.layout.fragment_main, container, false);
// Inflate the layout for this fragment
Button btnTest = (Button) _view.findViewById(R.id.btnTest);
btnTest.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
Mat img = Imgcodecs.imread(mediaStorageDir().getPath() + "/" + "test2.jpg");
if (img.empty()) {
Log.d("Fragment", "IMG EMPTY");
}
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1, CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
//show image
showImage(quad);
//store image
storeImage(quad);
}
});
return _view;
}
public void showImage (Mat img) {
ImageView imgView = (ImageView) getActivity().findViewById(R.id.sampleImageView);
//Mat mRgba = new Mat();
//mRgba = Utils.loadResource(MainAct.this, R.drawable.your_image,Highgui.CV_LOAD_IMAGE_COLOR);
Bitmap img2 = Bitmap.createBitmap(img.cols(), img.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(img, img2);
imgView.setImageBitmap(img2);
}
public File mediaStorageDir () {
File _mediaStorageDir = new File(Environment.getExternalStorageDirectory()
+ "/Android/data/"
+ getActivity().getApplicationContext().getPackageName());
return _mediaStorageDir;
}
public void storeImage(Mat matImg) {
Bitmap bitmapImg = Bitmap.createBitmap(matImg.cols(), matImg.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(matImg, bitmapImg);
String timeStamp = new SimpleDateFormat("ddMMyyyy_HHmm").format(new Date());
File mediaFile;
String mImageName="IMG_"+ timeStamp +".jpg";
mediaFile = new File(mediaStorageDir().getPath() + File.separator + mImageName);
File pictureFile = mediaFile;
try {
FileOutputStream fos = new FileOutputStream(pictureFile);
bitmapImg.compress(Bitmap.CompressFormat.PNG, 90, fos);
fos.close();
} catch (FileNotFoundException e) {
Log.d("FragmentMain", "File not found: " + e.getMessage());
} catch (IOException e) {
Log.d("FragmentMain", "Error accessing file: " + e.getMessage());
}
}
жӣҙж–°1пјҡ
жҲ‘иҰҒж„ҹи°ў@sturkmenзҡ„еӣһзӯ”гҖӮжҲ‘зҺ°еңЁеҸҜд»Ҙйҳ…иҜ»е№¶жүҫеҲ°й»‘иүІеҢәеҹҹгҖӮиҝҷйҮҢжҳҜAndroidд»Јз Ғпјҡ
{{1}}
2 дёӘзӯ”жЎҲ:
зӯ”жЎҲ 0 :(еҫ—еҲҶпјҡ2)
иҝҷжҳҜжҲ‘зҡ„иҜ•з”Ёд»Јз ҒдҪңдёәж ·жң¬гҖӮ
жҲ‘еёҢжңӣе®ғдјҡжңүжүҖеё®еҠ©гҖӮ пјҲжҲ‘зЁҚеҗҺдјҡж·»еҠ дёҖдәӣе…ідәҺд»Јз Ғзҡ„и§ЈйҮҠпјү
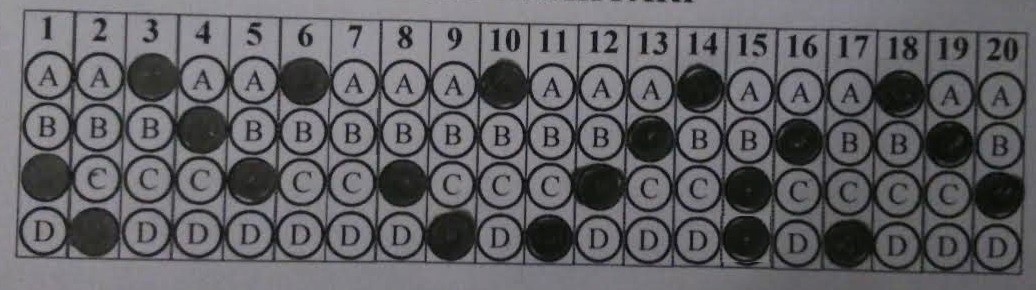
жөӢиҜ•еӣҫзүҮпјҲзј–иҫ‘дәҶжӮЁзҡ„еӣҫзүҮгҖӮжңүдёҖдёӘз©әзҡ„ж— ж•ҲеҸҢж Үи®°пјү
image description http://answers.opencv.org/upfiles/14639435664447751.jpg
{kind=link}
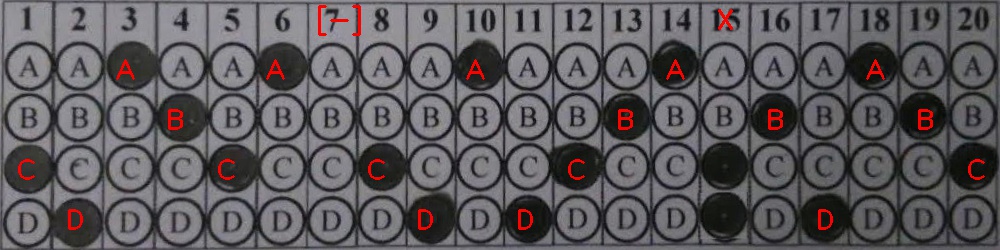
з»“жһңеӣҫзүҮ
image description http://answers.opencv.org/upfiles/14639682486508377.jpeg
{kind=link}
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
using namespace cv;
using namespace std;
int main( int argc, const char** argv )
{
Mat img = imread(argv[1]);
if(img.empty())
{
return -1;
}
Size dims(20,5); // this variable should be changed according input
Mat gray,thresh;
cvtColor(img, gray, COLOR_BGR2GRAY);
threshold(gray, thresh, 0, 255, THRESH_BINARY_INV + THRESH_OTSU);
Mat quad(img.size(), CV_8UC1); // should be improved
Mat results(img.size(), CV_8UC3);
vector<Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
vector<Point2f> corners;
vector<vector<Point> > contours;
findContours(thresh.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
for( size_t i = 0; i< contours.size(); i++ )
{
RotatedRect minRect = minAreaRect( Mat(contours[i]) );
// rotated rectangle
Point2f rect_points[4];
minRect.points( rect_points );
if(Rect(minRect.boundingRect()).width > img.cols / 2) // should be improved
for( int j = 0; j < 4; j++ )
{
Point2f pt = quad_pts[j];
Point2f nearest_pt = rect_points[0];
float dist = norm( pt - nearest_pt );
for( int k = 1; k < 4; k++ )
{
if( norm( pt - rect_points[k] ) < dist )
{
dist = norm( pt - rect_points[k] );
nearest_pt = rect_points[k];
}
}
corners.push_back( nearest_pt );
}
}
erode(thresh,thresh,Mat(),Point(-1,-1), 10); // should be improved
dilate(thresh,thresh,Mat(),Point(-1,-1), 5); // should be improved
Mat transmtx = getPerspectiveTransform(corners, quad_pts);
warpPerspective( img, results, transmtx, img.size()); // Create a Mat To Show results
warpPerspective( thresh, quad, transmtx, img.size());
resize(quad,quad,dims);
for(int i = 0; i < quad.cols; i++)
{
String answer = "";
answer += quad.at<uchar>(1,i) == 0 ? "" : "A";
answer += quad.at<uchar>(2,i) == 0 ? "" : "B";
answer += quad.at<uchar>(3,i) == 0 ? "" : "C";
answer += quad.at<uchar>(4,i) == 0 ? "" : "D";
if( answer.length() > 1 ) answer = "X"; // Double mark
int y = 0;
if( answer == "A" ) y = results.rows / dims.height;
if( answer == "B" ) y = results.rows / dims.height *2;
if( answer == "C" ) y = results.rows / dims.height *3;
if( answer == "D" ) y = results.rows / dims.height *4;
if( answer == "" ) answer = "[-]";
putText( results, answer, Point( 50* i + 15, 30 + y), FONT_HERSHEY_PLAIN, 2, Scalar(0,0,255),2);
}
imshow( "results", results );
waitKey(0);
return 0;
}
дҪңдёәеҜ№иҮӘе·ұзҡ„жҢ‘жҲҳжҲ‘иҜ•еӣҫеңЁJAVAдёӯе®һзҺ°дё»иҰҒйғЁеҲҶпјҲж–°жүӢеӨҚеҲ¶зІҳиҙҙд»Јз Ғпјү
Mat img = Imgcodecs.imread("test.jpg");
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1,CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad,quad,new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
иҝҷжҳҜпјҲ20x5pxпјүз»“жһңеӣҫеғҸпјҡimage description http://answers.opencv.org/upfiles/14639684166300772.png
{kind=link}
зӯ”жЎҲ 1 :(еҫ—еҲҶпјҡ1)
жҲ‘ж”№зј–дәҶ@sturkmenзҡ„д»Јз ҒгҖӮ
<ејә> fragment_main.xml
<FrameLayout xmlns:android="http://schemas.android.com/apk/res/android"
xmlns:tools="http://schemas.android.com/tools"
android:layout_width="match_parent"
android:layout_height="match_parent"
tools:context="{your package name}.FragmentMain">
<!-- TODO: Update blank fragment layout -->
<LinearLayout
android:orientation="vertical"
android:layout_width="match_parent"
android:layout_height="match_parent">
<Button
android:id="@+id/btnTest"
android:layout_width="match_parent"
android:layout_height="80dp"
android:text="Test" />
<ImageView
android:id="@+id/sampleImageView"
android:layout_width="match_parent"
android:layout_height="150dp"
android:layout_centerHorizontal="true"/>
</LinearLayout>
</framelayout>
<ејә>зҡ„AndroidManifest.xml
ж·»еҠ жӯӨиЎҢд»ҘиҺ·еҫ—еҶҷе…ҘжқғйҷҗгҖӮ
<uses-permission android:name="android.permission.WRITE_EXTERNAL_STORAGE" />
<ејә> FragmentMain.java
еӣҫзүҮж–Ү件пјҡ ж·»еҠ еҶ…йғЁеӯҳеӮЁз©әй—ҙ/ Android /ж•°жҚ®/жӮЁзҡ„еҢ…ж–Ү件еӨ№/ test.JPG
public View onCreateView(LayoutInflater inflater, ViewGroup container,
Bundle savedInstanceState) {
View _view = inflater.inflate(R.layout.fragment_main, container, false);
Button btnTest = (Button) _view.findViewById(R.id.btnTest);
btnTest.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View v) {
Mat img = Imgcodecs.imread(mediaStorageDir().getPath() + "/" + "test.JPG");
if (img.empty()) {
Log.d("FragmentMain", "Empty Image");
}
Size dims = new Size (20,5);
Mat gray = new Mat();
Mat thresh = new Mat();
//convert the image to black and white
Imgproc.cvtColor(img, gray, Imgproc.COLOR_BGR2GRAY);
storeImage(gray);
//convert the image to black and white does (8 bit)
Imgproc.threshold(gray, thresh, 0, 255, Imgproc.THRESH_BINARY_INV + Imgproc.THRESH_OTSU);
storeImage(thresh);
Mat temp = thresh.clone();
//find the contours
Mat hierarchy = new Mat();
Mat corners = new Mat(4,1, CvType.CV_32FC2);
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(temp, contours,hierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
hierarchy.release();
for (int idx = 0; idx < contours.size(); idx++)
{
MatOfPoint contour = contours.get(idx);
MatOfPoint2f contour_points = new MatOfPoint2f(contour.toArray());
RotatedRect minRect = Imgproc.minAreaRect( contour_points );
Point[] rect_points = new Point[4];
minRect.points( rect_points );
if(minRect.size.height > img.width() / 2)
{
List<Point> srcPoints = new ArrayList<Point>(4);
srcPoints.add(rect_points[2]);
srcPoints.add(rect_points[3]);
srcPoints.add(rect_points[0]);
srcPoints.add(rect_points[1]);
corners = Converters.vector_Point_to_Mat(
srcPoints, CvType.CV_32F);
}
}
Imgproc.erode(thresh, thresh, new Mat(), new Point(-1,-1), 10);
storeImage(thresh);
Imgproc.dilate(thresh, thresh, new Mat(), new Point(-1,-1), 5);
storeImage(thresh);
Mat results = new Mat(1000,250,CvType.CV_8UC3);
Mat quad = new Mat(1000,250,CvType.CV_8UC1);
List<Point> dstPoints = new ArrayList<Point>(4);
dstPoints.add(new Point(0, 0));
dstPoints.add(new Point(1000, 0));
dstPoints.add(new Point(1000, 250));
dstPoints.add(new Point(0, 250));
Mat quad_pts = Converters.vector_Point_to_Mat(
dstPoints, CvType.CV_32F);
Mat transmtx = Imgproc.getPerspectiveTransform(corners, quad_pts);
Imgproc.warpPerspective( img, results, transmtx, new Size(1000,250));
Imgproc.warpPerspective( thresh, quad, transmtx, new Size(1000,250));
Imgproc.resize(quad, quad, new Size(20,5));
Imgcodecs.imwrite("results.png",quad);
//store image
storeImage(quad);
//show image
showImage(quad);
System.out.println( quad.dump() );
for(int i = 0; i < quad.cols(); i++)
{
int size = (int) (quad.total() * quad.channels());
byte[] tmp = new byte[size];
String answer = "";
double[] d = new double[0];
d = quad.get(1, i);
answer += d[0] == 0 ? "" : "A";
d = quad.get(2, i);
answer += d[0] == 0 ? "" : "B";
d = quad.get(3, i);
answer += d[0] == 0 ? "" : "C";
d = quad.get(4, i);
answer += d[0] == 0 ? "" : "D";
if( answer.length() > 1 ) answer = "X"; // Double mark
int y = 0;
if( answer.equals("A")) y = results.rows() / (int) dims.height;
if( answer.equals("B")) y = results.rows() / (int) dims.height *2;
if( answer.equals("C")) y = results.rows() / (int) dims.height *3;
if( answer.equals("D")) y = results.rows() / (int) dims.height *4;
if( answer == "" ) answer = "[-]";
Imgproc.putText( results, answer, new Point( 50* i + 15, 30 + y), Core.FONT_HERSHEY_PLAIN, 2, new Scalar(0,0,255),2);
}
//store image
storeImage(results);
//show image
showImage(results);
}
});
public void showImage (Mat img) {
ImageView imgView = (ImageView) getActivity().findViewById(R.id.sampleImageView);
//Mat mRgba = new Mat();
//mRgba = Utils.loadResource(MainAct.this, R.drawable.your_image,Highgui.CV_LOAD_IMAGE_COLOR);
Bitmap img2 = Bitmap.createBitmap(img.cols(), img.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(img, img2);
imgView.setImageBitmap(img2);
}
public File mediaStorageDir () {
File _mediaStorageDir = new File(Environment.getExternalStorageDirectory()
+ "/Android/data/"
+ getActivity().getApplicationContext().getPackageName());
return _mediaStorageDir;
}
public void storeImage(Mat matImg) {
Bitmap bitmapImg = Bitmap.createBitmap(matImg.cols(), matImg.rows(),Bitmap.Config.ARGB_8888);
Utils.matToBitmap(matImg, bitmapImg);
String timeStamp = new SimpleDateFormat("ddMMyyyy_HHmm").format(new Date());
File mediaFile;
String mImageName="IMG_"+ timeStamp +".jpg";
mediaFile = new File(mediaStorageDir().getPath() + File.separator + mImageName);
File pictureFile = mediaFile;
try {
FileOutputStream fos = new FileOutputStream(pictureFile);
bitmapImg.compress(Bitmap.CompressFormat.PNG, 90, fos);
fos.close();
} catch (FileNotFoundException e) {
Log.d("FragmentMain", "File not found: " + e.getMessage());
} catch (IOException e) {
Log.d("FragmentMain", "Error accessing file: " + e.getMessage());
}
}
- еңЁSVGи·Ҝеҫ„дёӯжҹҘжүҫжңҖеӨ§зҡ„зҹ©еҪў
- жүҫеҲ°еӣӣиҫ№еҪўеҶ…жңҖеӨ§зҡ„зҹ©еҪў
- дҪҝз”ЁOpenCVд»ҺеӣҫеғҸдёӯжЈҖжөӢжңҖеӨ§зҡ„зҹ©еҪў
- еҰӮдҪ•жЈҖжөӢжңҖеӨ§зҹ©еҪўиҪ®е»“еҶ…зҡ„ж Үи®°й»‘иүІеҢәеҹҹпјҹ
- еңЁеӨҡиҫ№еҪўеҶ…жүҫеҲ°жңҖеӨ§зҡ„зҹ©еҪў - Python
- еҰӮдҪ•жүҫеҲ°жңҖеӨ§зҡ„иҪ®е»“пјҹ
- openCVжЈҖжөӢиҪ®е»“еҶ…зҡ„еҪўзҠ¶
- OpenCVжЈҖжөӢе®ҪеәҰжңҖеӨ§зҡ„зҹ©еҪў
- еҰӮдҪ•еңЁиҪ®е»“OpenCVдёӯжүҫеҲ°вҖңеҢәеҹҹвҖқпјҹ
- еҰӮдҪ•еңЁиҪ®е»“еҢәеҹҹеҶ…жҹҘжүҫе’Ңз»ҳеҲ¶жңҖеӨ§зҡ„зҹ©еҪўпјҹ
- жҲ‘еҶҷдәҶиҝҷж®өд»Јз ҒпјҢдҪҶжҲ‘ж— жі•зҗҶи§ЈжҲ‘зҡ„й”ҷиҜҜ
- жҲ‘ж— жі•д»ҺдёҖдёӘд»Јз Ғе®һдҫӢзҡ„еҲ—иЎЁдёӯеҲ йҷӨ None еҖјпјҢдҪҶжҲ‘еҸҜд»ҘеңЁеҸҰдёҖдёӘе®һдҫӢдёӯгҖӮдёәд»Җд№Ҳе®ғйҖӮз”ЁдәҺдёҖдёӘз»ҶеҲҶеёӮеңәиҖҢдёҚйҖӮз”ЁдәҺеҸҰдёҖдёӘз»ҶеҲҶеёӮеңәпјҹ
- жҳҜеҗҰжңүеҸҜиғҪдҪҝ loadstring дёҚеҸҜиғҪзӯүдәҺжү“еҚ°пјҹеҚўйҳҝ
- javaдёӯзҡ„random.expovariate()
- Appscript йҖҡиҝҮдјҡи®®еңЁ Google ж—ҘеҺҶдёӯеҸ‘йҖҒз”өеӯҗйӮ®д»¶е’ҢеҲӣе»әжҙ»еҠЁ
- дёәд»Җд№ҲжҲ‘зҡ„ Onclick з®ӯеӨҙеҠҹиғҪеңЁ React дёӯдёҚиө·дҪңз”Ёпјҹ
- еңЁжӯӨд»Јз ҒдёӯжҳҜеҗҰжңүдҪҝз”ЁвҖңthisвҖқзҡ„жӣҝд»Јж–№жі•пјҹ
- еңЁ SQL Server е’Ң PostgreSQL дёҠжҹҘиҜўпјҢжҲ‘еҰӮдҪ•д»Һ第дёҖдёӘиЎЁиҺ·еҫ—第дәҢдёӘиЎЁзҡ„еҸҜи§ҶеҢ–
- жҜҸеҚғдёӘж•°еӯ—еҫ—еҲ°
- жӣҙж–°дәҶеҹҺеёӮиҫ№з•Ң KML ж–Ү件зҡ„жқҘжәҗпјҹ