如何在空间上重复排序组合
很抱歉选择一个不具有表现力的标题但我无法想出更好的标题。
我正在寻找一种算法方式来查找重复组合,并按照以下方式在空间上对它们进行排序:
订单2(2x2):
AA AB
AD AC/BD
订单4(4x4):
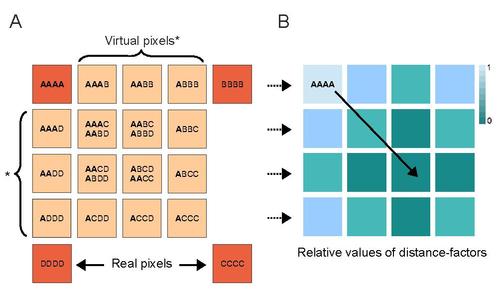
AAAA AAAB AABB ABBB
AAAD AAAC/AABD AABC/ABBD ABBC
AADD AACD/ABDC ABCD/AACC ABCC
ADDD ACDD ACCD ACCC
特别是那些双选项字段(例如AAAC / AABD)令我头疼。这些组合将用于计算真实像素之间的相关性。即例如,AA组合是A的自相关,而AB则是A和B的互相关。
这个方案是我目前试图实现的显微镜算法所必需的(参见交叉累积量部分): http://en.wikipedia.org/wiki/Super-resolution_optical_fluctuation_imaging
除此之外,我还需要尽可能以最有效的方式执行此操作,因为我通常必须对数千张图像执行操作,每张图像至少为512x512(我在CUDA中执行此操作) )。编辑:我刚刚意识到高效率并不是真正需要的,因为一旦订单被选中,模式就不会发生变化。
此图片可能有所帮助:
2 个答案:
答案 0 :(得分:1)
http://www.opticsinfobase.org/boe/abstract.cfm?uri=boe-2-3-408
如果我在你的位置,我会尝试直接联系该论文的作者并询问他们的数字意味着什么,因为我没有看到他们如何决定使用这些组合。在3x3插值像素集中,由四个角上的像素A,B,C,D对称地限制,为什么A是每个组合中唯一需要出现的字母?如果我理解字母表示的是什么(每个插值像素的值中真实像素的相对权重),那么标记为ABCD AACC的对角线交叉点上的像素给予A和C两倍于B和D的权重;实际上,平均而言,整个3x3像素块的A和C的重量是B和D的两倍。这似乎与问题的基本对称性不一致。
答案 1 :(得分:0)
你提供的wiki链接中的数学(关于超分辨率光学波动成像)可能需要我进行相当多的研究才能理解,但我观察到至少有一种可能的方法来考虑图A:
我认为A是一个锚点,向量可以从B,C和D延伸到A。直接向量可能相当明显 - 当我们从D直接向D移动时,A会累积(即AAAD,AADD,ADDD);与B到A和C到D一样。
我将中间组合视为从边框水平或垂直延伸的向量。例如,从AAAB下来,我们添加一个C,然后添加另一个C;从AADD向右走,我们添加一个{{1}},然后到达中间,ABCD。
我认为图中的任何一个组合都按字母顺序排序,这可以解释某些累积位置的明显差异,例如,从ADDD转移到ACCC时累积{{1}}的位置,比较从ABBB搬到ACCC时,积累“C”的位置。
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?