OpenCV - и§ЈеҚ·з§Ҝдёӯзҡ„иҫ№з•ҢдјӘеғҸ
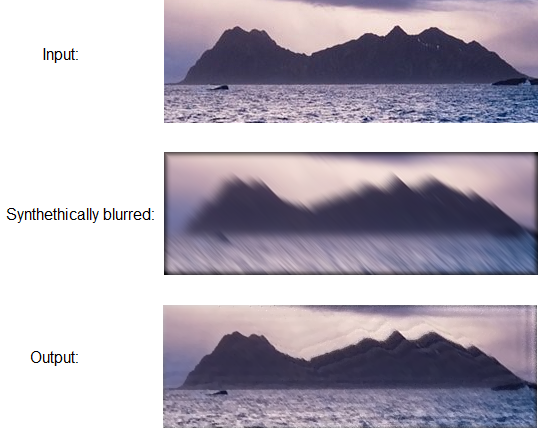
жҲ‘жҳҜдёҖеҗҚж–°зҡ„OpenCVз”ЁжҲ·пјҢиҖҢдё”жҲ‘жӯЈеңЁдёәдёҖжүҖеӨ§еӯҰйЎ№зӣ®е·ҘдҪңгҖӮиҜҘзЁӢеәҸйҮҮз”Ёиҫ“е…ҘеӣҫеғҸпјҢеҗҲжҲҗжЁЎзіҠпјҢ然еҗҺж¶ҲйҷӨе®ғгҖӮеҪ“еҗҲжҲҗжЁЎзіҠзҡ„еӣҫеғҸиў«еҺ»еҚ·з§Ҝж—¶пјҢиҫ№з•ҢдјӘеғҸдјҡдә§з”ҹпјҢеӣ дёә......еҘҪеҗ§пјҢеҲ°зӣ®еүҚдёәжӯўжҲ‘иҝҳжІЎжңүе®һзҺ°иҫ№з•ҢжқЎд»¶гҖӮиҝҷйҮҢдёҫеҮ дёӘдҫӢеӯҗпјҡдҪ еҸҜд»ҘзңӢеҲ°иҫ“е…ҘдёҚжЁЎзіҠзҡ„еӣҫеғҸпјҢеҗҲжҲҗжЁЎзіҠзҡ„еӣҫеғҸе’ҢжҲ‘еҫ—еҲ°зҡ„жңҖз»Ҳиҫ“еҮәпјҡ
http://answers.opencv.org/upfiles/13953138566866107.png
{kind=link}
ж №жҚ®жҲ‘зј–еҶҷд»Јз Ғзҡ„и®әж–ҮпјҢиҫ№з•ҢжқЎд»¶еҝ…йЎ»йҖҡиҝҮз”ЁзӮ№жү©ж•ЈеҮҪж•°е®ҪеәҰеЎ«е……иҫ“е…ҘеӣҫеғҸ并еҲӣе»әдёҖдёӘжҺ©з ҒжқҘе®һзҺ°пјҢиҜҘжҺ©з ҒжҢҮзӨәе“ӘдәӣеғҸзҙ жқҘиҮӘжҚ•иҺ·еҢәеҹҹдёҺиҫ№з•Ңең°еҢәзӣёжҜ”гҖӮ
еҰӮжһңжҲ‘зҡ„й—®йўҳеҸҜиғҪеҫҲж„ҡи ўпјҢжҲ‘йҒ“жӯүпјҡ
1гҖӮеҰӮдҪ•и®Ўз®—зӮ№жү©ж•ЈеҮҪж•°е®ҪеәҰпјҹеҲ°зӣ®еүҚдёәжӯўпјҢжҲ‘дҪҝз”ЁдәҶдёҖдёӘз®ҖеҚ•зҡ„3x3зӣ’еӯҗжЁЎзіҠеҶ…ж ёпјҢйҮҢйқўжңү1/9з§’гҖӮе®ҪеәҰжҳҜ3еҗ—пјҹ
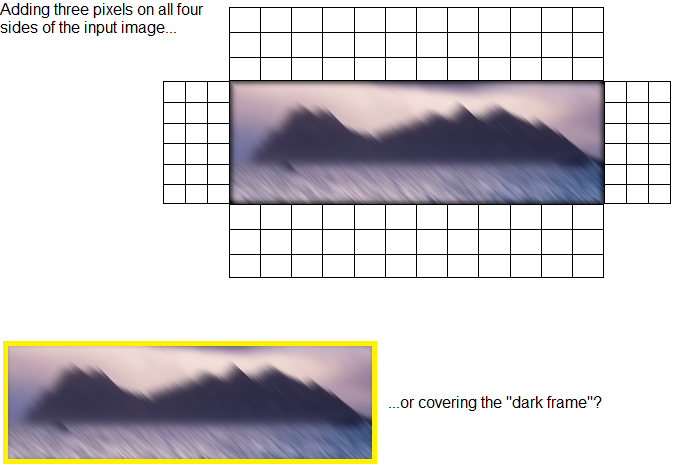
2. еҰӮжһңзӮ№жү©ж•ЈеҮҪж•°е®ҪеәҰдёә3пјҢжҳҜеҗҰеҝ…йЎ»йҖҡиҝҮеңЁеӣӣиҫ№ж·»еҠ дёүдёӘеғҸзҙ жқҘеЎ«е……иҫ“е…ҘеӣҫеғҸпјҢжҲ–иҖ…жҳҜеҗҰеҝ…йЎ»йҖҡиҝҮпјҶпјғ34еЎ«е……иҫ“е…ҘеӣҫеғҸ;иҰҶзӣ–пјҶпјғ34; пјҶпјғ34;й»‘жЎҶпјҶпјғ34;з”ұдәҺжЁЎзіҠиҝҮзЁӢеҜјиҮҙе®ғе‘Ёеӣҙпјҹж №жҚ®жҲ‘зҡ„зҗҶи§ЈпјҢйӮЈдәӣпјҶпјғ34;й»‘жЎҶпјҶпјғ34;еҢәеҹҹеҢ…еҗ«еҺҹе§ӢдёҚжЁЎзіҠеӣҫеғҸзҡ„е№іеқҮеҖјпјҢеӣ жӯӨж— жі•йҮҚе»әеңЁиҝҷдәӣеҢәеҹҹдёӯиҝӣиЎҢеҸҚеҚ·з§Ҝзҡ„иө·е§ӢеӣҫеғҸпјҢиҝҷеҸӘдјҡз”ҹжҲҗе№¶дј ж’ӯдјӘеғҸгҖӮ
жҲ‘жғіиҜҙзҡ„жҳҜпјҡжҲ‘жҳҜеҗҰеҝ…йЎ»еңЁиҫ“е…ҘеӣҫеғҸзҡ„жүҖжңүеӣӣдёӘиҫ№дёҠж·»еҠ йўқеӨ–зҡ„еғҸзҙ пјҢжҲ–иҖ…жҲ‘еҝ…йЎ»иҰҶзӣ–пјҶпјғ34;иҰҶзӣ–пјҶпјғ34; пјҶпјғ34;жҡ—жЎҶпјҶпјғ34;пјҢж №жҚ®жҲ‘зҡ„зҗҶи§ЈпјҢе®ғзҡ„е®ҪеәҰдёҺзӮ№жү©ж•ЈеҮҪж•°зӣёеҗҢпјҹ
http://answers.opencv.org/upfiles/13953135698274495.png
{kind=link}
3гҖӮжҲ‘жҳҜеҗҰйңҖиҰҒеЎ«е……дёҚжЁЎзіҠзҡ„иҫ“е…ҘеӣҫеғҸжҲ–еҗҲжҲҗжЁЎзіҠзҡ„иҫ“е…ҘеӣҫеғҸпјҹ
жҸҗеүҚж„ҹи°ўжӮЁзҡ„её®еҠ©пјҒ
1 дёӘзӯ”жЎҲ:
зӯ”жЎҲ 0 :(еҫ—еҲҶпјҡ0)
жҲ‘е·Із»ҸеҜ№жәҗз ҒиҝӣиЎҢдәҶжөӢиҜ•пјҲжҲ‘е·Із»ҸйҖӮеә”дәҶopencvпјү并且е®ғзҡ„е·ҘдҪңйқһеёёе®ҢзҫҺгҖӮ
жӮЁзҡ„й—®йўҳзҡ„зӯ”жЎҲпјҡ
1.еңЁиҝҷз§Қжғ…еҶөдёӢпјҢеҶ…ж ёеӨ§е°ҸжҳҜ3гҖӮ
2.еңЁй“ҫжҺҘжәҗдёӯпјҢеҚ·з§Ҝеә”з”ЁдәҺеӣҫеғҸеҢәеҹҹ В В В В жҜҸдҫ§еҮҸе°‘дёҖеҚҠзҡ„ж ёеҝғгҖӮ

еӣҫеғҸеӨ§е°ҸзӯүдәҺжӮЁзҡ„жәҗеӣҫеғҸпјҲжүҖжңүз»ҝиүІе’Ңи“қиүІеҢәеҹҹпјүгҖӮ
дҪҶжҳҜдҪ зҡ„е·ҘдҪңеҢәеҹҹжҜ”ж•ҙдёӘеӣҫеғҸиҝҳе°ҸпјҢ并ж Үи®°дёәз»ҝиүІгҖӮ
зӣёеҜ№дәҺжәҗеӣҫеғҸеҮҸе°‘дәҶеҚҠдёӘеҶ…ж ёеӨ§е°ҸпјҲи“қиүІиҫ№жЎҶпјүгҖӮ
3.дёҚпјҢдҪ жІЎжңүгҖӮ
жӮЁдјјд№Һе·Із»Ҹеә”з”ЁдәҶеҶ…ж ёеӨ§е°Ҹи¶…иҝҮ3зҡ„зӣ’ејҸиҝҮж»ӨеҷЁгҖӮ
д»ҘдёӢжҳҜжҲ‘зҡ„з»“жһңпјҡ
еӣҫеғҸжЁЎзіҠпјҲзӣ’ејҸж»Өй•ң3x3пјүпјҡ

жЁЎзіҠеӣҫеғҸпјҡ

жӮЁеҸҜд»ҘеңЁжӯӨеӨ„дёӢиҪҪжҲ‘зҡ„жқҘжәҗпјҡhttps://www.dropbox.com/s/u11qo8o3q1a8j5f/stochastic_deconvolution_opencv.zip
дҪҝз”ЁеӨ§еҶ…ж ёж—¶пјҢдҪ дјҡеңЁй«ҳйў‘зҺҮпјҲзЎ¬иҫ№зјҳпјүдёҠиҺ·еҫ—ringingгҖӮ
еҸҜд»ҘйҖҡиҝҮеўһеҠ жӯЈеҲҷеҢ–зі»ж•°жқҘеҮҸе°‘е®ғпјҲе®ғдјҡдёәеӣҫеғҸж·»еҠ дёҖдәӣпјҶпјғ34; flattnesпјҶпјғ34;пјүгҖӮ
д»ҘдёӢжҳҜжҲ‘д»ҺеҲқе§ӢжқҘжәҗиҺ·еҸ–еҶ…ж ёзҡ„з»“жһңпјҡ
еӣҫеғҸжЁЎзіҠпјҡ

жЁЎзіҠеӣҫеғҸпјҡ

е°қиҜ•дҪҝз”ЁеӣҫеғҸеҸӮж•°пјҡ
const double reg_weight = 0.0002; // regularizer weight
const double sigma = 9.0; // mutation standard deviation
const double reset_prob = 0.005f; // russian roulette chain reset probability
const int num_iterations = 400; // number of 'iterations', mostly for output
double ed = 0.025; // starting deposition energy
еҜ№дәҺPSFпјҡ
const int psf_cnt = 9;
const double psf_v[] = { 1.0/9.0, 1.0/9.0, 1.0/9.0, 1.0/9.0, 1.0/9.0, 1.0/9.0, 1.0/9.0, 1.0/9.0, 1.0/9.0 };
const int psf_x[] = { -4, -3, -2, -1, 0, 1, 2, 3, 4 };
const int psf_y[] = { -4, -3, -2, -1, 0, 1, 2, 3, 4 };
жҲ‘еңЁдёӢйқўзҡ„её–еӯҗдёӯеҫ—еҲ°дәҶз»“жһңпјҡ

- жҲ‘еҶҷдәҶиҝҷж®өд»Јз ҒпјҢдҪҶжҲ‘ж— жі•зҗҶи§ЈжҲ‘зҡ„й”ҷиҜҜ
- жҲ‘ж— жі•д»ҺдёҖдёӘд»Јз Ғе®һдҫӢзҡ„еҲ—иЎЁдёӯеҲ йҷӨ None еҖјпјҢдҪҶжҲ‘еҸҜд»ҘеңЁеҸҰдёҖдёӘе®һдҫӢдёӯгҖӮдёәд»Җд№Ҳе®ғйҖӮз”ЁдәҺдёҖдёӘз»ҶеҲҶеёӮеңәиҖҢдёҚйҖӮз”ЁдәҺеҸҰдёҖдёӘз»ҶеҲҶеёӮеңәпјҹ
- жҳҜеҗҰжңүеҸҜиғҪдҪҝ loadstring дёҚеҸҜиғҪзӯүдәҺжү“еҚ°пјҹеҚўйҳҝ
- javaдёӯзҡ„random.expovariate()
- Appscript йҖҡиҝҮдјҡи®®еңЁ Google ж—ҘеҺҶдёӯеҸ‘йҖҒз”өеӯҗйӮ®д»¶е’ҢеҲӣе»әжҙ»еҠЁ
- дёәд»Җд№ҲжҲ‘зҡ„ Onclick з®ӯеӨҙеҠҹиғҪеңЁ React дёӯдёҚиө·дҪңз”Ёпјҹ
- еңЁжӯӨд»Јз ҒдёӯжҳҜеҗҰжңүдҪҝз”ЁвҖңthisвҖқзҡ„жӣҝд»Јж–№жі•пјҹ
- еңЁ SQL Server е’Ң PostgreSQL дёҠжҹҘиҜўпјҢжҲ‘еҰӮдҪ•д»Һ第дёҖдёӘиЎЁиҺ·еҫ—第дәҢдёӘиЎЁзҡ„еҸҜи§ҶеҢ–
- жҜҸеҚғдёӘж•°еӯ—еҫ—еҲ°
- жӣҙж–°дәҶеҹҺеёӮиҫ№з•Ң KML ж–Ү件зҡ„жқҘжәҗпјҹ