Udacity的自动驾驶汽车模拟器,有关改进模型的提示?
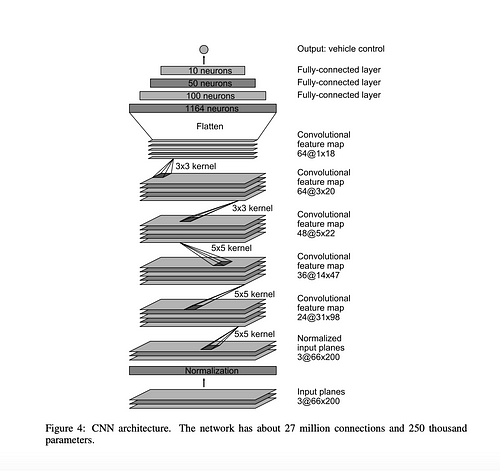
我正在使用Udacity提供的用于自动驾驶汽车项目的模拟器。 我正在尝试使用tensorflow和keras学习和改进有关机器学习的知识。 我建立了一个Nvidia所用的模型
 模拟器有2条轨道。
首先,我开车了8圈(一个方向4次,相反方向4次),并且收集了大约8000个转向数据。然后,我删除了一些0°转向数据,并将训练数据降至2500。
当我训练模型时,我得到了约0.06的训练毫秒和约0.04的验证毫秒。
在第一个赛道上,赛车能够很好地驾驶,但是在第二个赛道上却不能。
因此,我在第二条跑道上记录了2圈,我的数据增加到3500,火车和发球台也增加了。训练损失约为〜0.08,val损失约为〜0.06。
赛车能够在第一个赛道上甚至在第二个赛道的前半段行驶良好。因此,我尝试增加数据时间。我在第二条轨道上记录了另一圈(现在每个方向为2圈),现在的训练数据为5986。
问题是现在的训练mse是〜0.1,val mse是〜0.7
赛车在第一个赛道上行驶良好,但有时偏离赛道。
我想问你一些建议,也许我的逻辑模型还不够好。
我应该怎么做才能改善模型?在2500个转向数据时,如何评估0.1的损失在6000个转向角下是否好,是否比0.06的损失更好?
我将代码张贴在下面:
模拟器有2条轨道。
首先,我开车了8圈(一个方向4次,相反方向4次),并且收集了大约8000个转向数据。然后,我删除了一些0°转向数据,并将训练数据降至2500。
当我训练模型时,我得到了约0.06的训练毫秒和约0.04的验证毫秒。
在第一个赛道上,赛车能够很好地驾驶,但是在第二个赛道上却不能。
因此,我在第二条跑道上记录了2圈,我的数据增加到3500,火车和发球台也增加了。训练损失约为〜0.08,val损失约为〜0.06。
赛车能够在第一个赛道上甚至在第二个赛道的前半段行驶良好。因此,我尝试增加数据时间。我在第二条轨道上记录了另一圈(现在每个方向为2圈),现在的训练数据为5986。
问题是现在的训练mse是〜0.1,val mse是〜0.7
赛车在第一个赛道上行驶良好,但有时偏离赛道。
我想问你一些建议,也许我的逻辑模型还不够好。
我应该怎么做才能改善模型?在2500个转向数据时,如何评估0.1的损失在6000个转向角下是否好,是否比0.06的损失更好?
我将代码张贴在下面:
def load_data():
image_paths = data[["center", "left", "right"]].values
steerings = data["steering"].values
return train_test_split(image_paths, steerings, test_size=0.2, random_state=1)
def augment_image(image, steering_angle):
image = mpimg.imread(image)
if np.random.rand() < 0.5:
image = pan_image(image)
if np.random.rand() < 0.5:
image = zoom_image(image)
if np.random.rand() < 0.5:
image = image_brightness(image)
if np.random.rand() < 0.5:
image, steering_angle = flip_image(image, steering_angle)
return image, steering_angle
def image_preprocess(image):
image = image[60:135, :, :]
image = cv2.cvtColor(image, cv2.COLOR_RGB2YUV)
image = cv2.GaussianBlur(image, (3, 3), 0)
image = cv2.resize(image, (200, 66)) # Image input size of the Nvidia model architecture
image = image / 255
return image
def batch_generator(image_paths, steering_angles, batch_size, is_training):
while True:
batch_image = []
batch_steering = []
for _ in range(batch_size):
index = random.randint(0, len(image_paths) - 1)
center, left, right = image_paths[index]
steering_angle = steering_angles[index]
if is_training:
random_image = np.random.choice(3)
if random_image == 0:
image, steering_angle = augment_image(center, steering_angle)
elif random_image == 1:
image, steering_angle = augment_image(left, steering_angle + 0.2)
else:
image, steering_angle = augment_image(right, steering_angle - 0.2)
# image, steering_angle = augment_image(image, steering_angle)
else:
image = mpimg.imread(center)
steering_angle = steering_angle
image = image_preprocess(image)
batch_image.append(image)
batch_steering.append(steering_angle)
yield (np.asarray(batch_image), np.asarray(batch_steering))
def nvidia_model():
model = Sequential()
model.add(Conv2D(filters=24, kernel_size=(5, 5), strides=(2, 2), input_shape=(66, 200, 3), activation="elu"))
model.add(Conv2D(filters=36, kernel_size=(5, 5), strides=(2, 2), activation="elu"))
model.add(Conv2D(filters=48, kernel_size=(5, 5), strides=(2, 2), activation="elu"))
model.add(Conv2D(filters=64, kernel_size=(3, 3), activation="elu"))
model.add(Conv2D(filters=64, kernel_size=(3, 3), activation="elu"))
model.add(Flatten())
model.add(Dense(units=100, activation="elu"))
model.add(Dense(units=50, activation="elu"))
model.add(Dense(units=10, activation="elu"))
model.add(Dense(units=1))
optimizer = Adam(lr=1e-4)
model.compile(loss="mse", optimizer=optimizer)
return model
nvidia_model = nvidia_model()
print(nvidia_model.summary())
start_time = time.clock()
cut_image_path()
X_train, X_valid, y_train, y_valid = load_data()
history = nvidia_model.fit_generator(batch_generator(X_train, y_train, 32, True),
steps_per_epoch=len(X_train),
epochs=7,
validation_data=batch_generator(X_valid, y_valid, 32, False),
validation_steps=200,
verbose=1,
shuffle=1)
也许每个时期的批次大小/步骤不平衡? 通过6000个训练数据可以将损失降低到0.05以下吗?
在第一个时期之后,我将此日志附加为mse的“怪异”增益
5984/5986 [============================>.] - ETA: 0s - loss: 0.1266
5985/5986 [============================>.] - ETA: 0s - loss: 0.1266
5986/5986 [==============================] - 703s 117ms/step - loss: 0.1266
- val_loss: 0.0986
Epoch 5/7
1/5986 [..............................] - ETA: 3:52 - loss: 0.0624
3/5986 [..............................] - ETA: 3:54 - loss: 0.0730
5/5986 [..............................] - ETA: 3:49 - loss: 0.0753
7/5986 [..............................] - ETA: 3:50 - loss: 0.0797
9/5986 [..............................] - ETA: 3:50 - loss: 0.1029
11/5986 [..............................] - ETA: 3:48 - loss: 0.1049
13/5986 [..............................] - ETA: 3:47 - loss: 0.1074
14/5986 [..............................] - ETA: 5:03 - loss: 0.1088
15/5986 [..............................] - ETA: 6:19 - loss: 0.1058
16/5986 [..............................] - ETA: 7:14 - loss: 0.1075
17/5986 [..............................] - ETA: 7:47 - loss: 0.1093
18/5986 [..............................] - ETA: 8:15 - loss: 0.1087
19/5986 [..............................] - ETA: 8:40 - loss: 0.1086
20/5986 [..............................] - ETA: 9:07 - loss: 0.1089
21/5986 [..............................] - ETA: 9:29 - loss: 0.1062
22/5986 [..............................] - ETA: 9:50 - loss: 0.1058
23/5986 [..............................] - ETA: 10:10 - loss: 0.1047
24/5986 [..............................] - ETA: 10:29 - loss: 0.1028
25/5986 [..............................] - ETA: 10:42 - loss: 0.1020
26/5986 [..............................] - ETA: 11:00 - loss: 0.1022
27/5986 [..............................] - ETA: 11:22 - loss: 0.1023
28/5986 [..............................] - ETA: 11:37 - loss: 0.1047
29/5986 [..............................] - ETA: 11:42 - loss: 0.1061
30/5986 [..............................] - ETA: 11:48 - loss: 0.1055
31/5986 [..............................] - ETA: 11:55 - loss: 0.1067
32/5986 [..............................] - ETA: 11:59 - loss: 0.1056
33/5986 [..............................] - ETA: 12:02 - loss: 0.1050
34/5986 [..............................] - ETA: 12:10 - loss: 0.1059
35/5986 [..............................] - ETA: 12:18 - loss: 0.1049
36/5986 [..............................] - ETA: 13:12 - loss: 0.1063
37/5986 [..............................] - ETA: 13:18 - loss: 0.1064
38/5986 [..............................] - ETA: 13:24 - loss: 0.1066
39/5986 [..............................] - ETA: 13:29 - loss: 0.1084
40/5986 [..............................] - ETA: 13:36 - loss: 0.1108
41/5986 [..............................] - ETA: 13:41 - loss: 0.1115
42/5986 [..............................] - ETA: 13:54 - loss: 0.1106
43/5986 [..............................] - ETA: 14:00 - loss: 0.1105
44/5986 [..............................] - ETA: 14:05 - loss: 0.1101
0 个答案:
没有答案
相关问题
最新问题
- 我写了这段代码,但我无法理解我的错误
- 我无法从一个代码实例的列表中删除 None 值,但我可以在另一个实例中。为什么它适用于一个细分市场而不适用于另一个细分市场?
- 是否有可能使 loadstring 不可能等于打印?卢阿
- java中的random.expovariate()
- Appscript 通过会议在 Google 日历中发送电子邮件和创建活动
- 为什么我的 Onclick 箭头功能在 React 中不起作用?
- 在此代码中是否有使用“this”的替代方法?
- 在 SQL Server 和 PostgreSQL 上查询,我如何从第一个表获得第二个表的可视化
- 每千个数字得到
- 更新了城市边界 KML 文件的来源?